Линейный синхронный двигатель с постоянными магнитами с синусоидальным распределением потока
Simscape / Электрический / Электромеханический / Постоянный магнит

Блок PMLSM моделирует постоянный магнит линейный синхронный двигатель с трехфазным статором раны Уая. Рисунок показывает эквивалентную электрическую схему для обмоток статора.
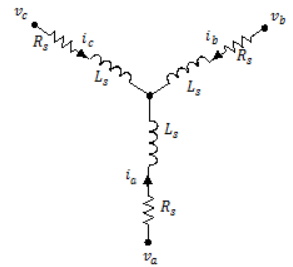
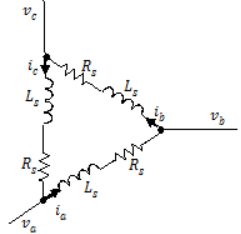
Можно также смоделировать постоянный магнит линейный синхронный двигатель в настройке раны дельты установкой Winding type к Delta-wound.
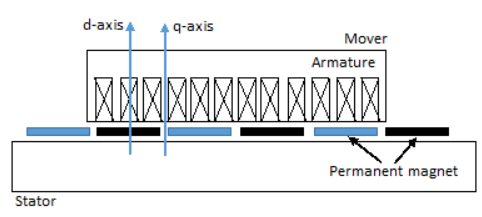
Этот рисунок показывает моторную конструкцию.
Напряжения через обмотки статора заданы:
где:
va, vb и vc являются отдельными напряжениями фазы через обмотки статора.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти три обмотки способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан:
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, Lbc, Lca и Lcb являются взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями электрического угла и задана:
и
где:
θe является электрическим углом.
rotor offset является 0 если вы задаете ротор электрический угол относительно d-оси или -pi/2 если вы задаете ротор электрический угол относительно q-оси.
и τ является полярной подачей.
x является расстоянием.
Ls является самоиндукцией статора на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является колебанием самоиндукции и взаимной индуктивности с изменяющимся углом.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Поток постоянного магнита, соединяющий извилистый a, является максимумом когда θe = 0 ° и нуль когда θe = 90 °. Поэтому соединенный моторный поток задан:
где ψm является потокосцеплением постоянного магнита.
Применение преобразования Парка к электрическим уравнениям производит выражение для силы, которая независима от угла.
Преобразование парка задано:
где θe является электрическим углом, заданным как Npx.
Используя преобразование Парка на статоре извилистые напряжения и токи преобразовывают их в систему координат dq0, которая независима от угла:
и
Применение преобразования Парка к первым двум электрическим уравнениям производит следующие уравнения, которые задают поведение блока:
и
где:
Ld = Ls + Ms + 3/2 Lm. Ld является статором d - составляющая индукции.
Lq = Ls + Ms − 3/2 Lm. Lq является статором q - составляющая индукции.
L0 = Ls – 2Ms. L0 является индуктивностью нулевой последовательности статора.
Rs является сопротивлением статора на фазу.
v является линейной скоростью.
Np является полярным фактором подачи.
M является массой двигателя.
Bm является затуханием.
FL является силой загрузки.
Использование блока PMLSM исходная, неортогональная реализация Парка преобразовывает. При попытке применить альтернативную реализацию, вы получаете различные результаты для dq0 напряжения и токов.
Отношение между силой постоянный kf, коэффициент противо-ЭДС, постоянная ke, и потокосцеплением постоянного магнита определяется следующим образом:
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. IEEE нажимает Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
[3] С. Чжан и Дж. Пэн. Нелинейное Устойчивое Управление Скользящим режимом для PM Linear Synchronous Motors. 2 006 CES/IEEE 5-я Международная Конференция по Управлению Силовой электроникой и Движением, Шанхай, 2006, стр 1–5.
