PMSM (Five-Phase)
Пятифазовый постоянный магнит синхронный двигатель с синусоидальным распределением потока
Описание
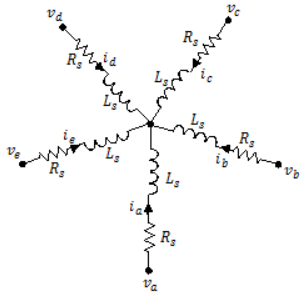
Блок PMSM (Five-Phase) моделирует постоянный магнит синхронный двигатель с пятифазовым статором звездообразной раны. Рисунок показывает эквивалентную электрическую схему для соединенных со звездой обмоток статора.
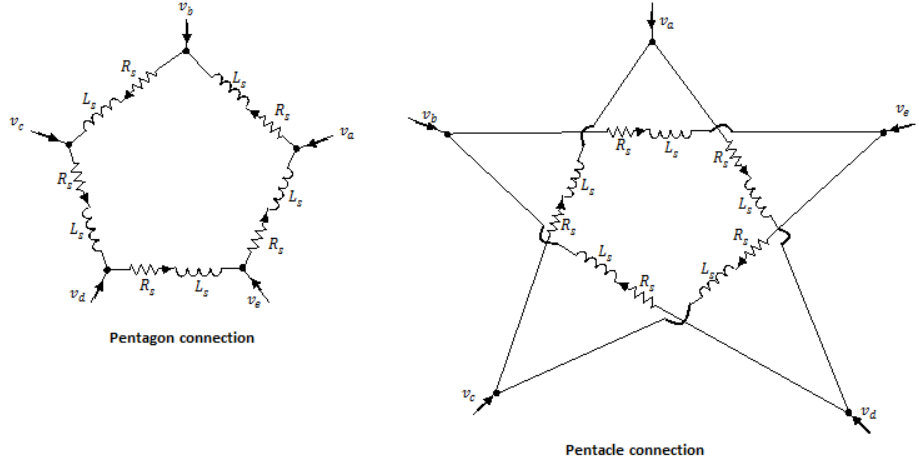
Можно также смоделировать постоянный магнит синхронный двигатель или в пятигранной ране или в настройке раны магической фигуры установкой Winding type к Pentagon-wound или Pentacle-wound.
Моторная конструкция
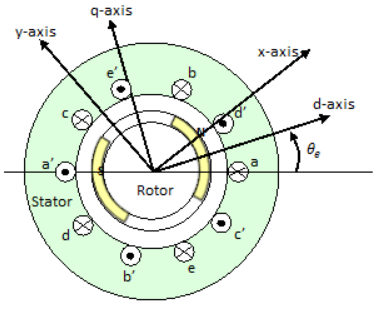
Этот рисунок показывает моторную конструкцию с однополюсно-парным на роторе.
Постоянные магниты генерируют магнитное поле ротора, которое создает синусоидальную скорость изменения потока с углом ротора.
Для соглашения осей на предыдущем рисунке a - выравниваются фаза и потоки постоянного магнита, когда угол механического устройства ротора, θr, является нулем. Блок поддерживает второе определение оси ротора, в котором угол механического устройства ротора задан как угол между a - фазой магнитная ось и ротором q - ось.
Уравнения
Напряжения через обмотки статора заданы:
где:
va, vb, vc, vd и ve являются отдельными напряжениями фазы через обмотки статора.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib, ic, id и ie являются токами, текущими в обмотках статора.
и скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти пять обмоток способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан:
где:
ψa, ψb, ψc, ψd и ψe являются общими потоками, которые соединяют каждую обмотку статора.
Laa, Lbb, Lcc, Ldd и Lee являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и так далее, является взаимной индуктивностью обмоток статора.
ψam, ψbm, ψcm, ψdm и ψem являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями ротора электрический угол, заданный:
и
где:
θr является углом механического устройства ротора.
θe является ротором электрический угол.
rotor offset является 0 если вы задаете ротор электрический угол относительно d-оси или -pi/2 если вы задаете ротор электрический угол относительно q-оси.
Ls является статором самоиндукция на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является колебанием самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Поток постоянного магнита, соединяющий извилистый a-a', в максимуме когда θe = 0 ° и нуль когда θe = 90 °. Поэтому соединенный моторный поток задан:
где ψm является потокосцеплением постоянного магнита.
Упрощенные электрические уравнения
Чтобы удалить угловую зависимость ротора для индуктивных условий, вы выполняете преобразование, T, на моторных уравнениях.
Преобразование T задано:
где θe является электрическим углом, заданным как Nθr. N является количеством пар полюса.
Матрица преобразования имеет следующее псевдоортогональное свойство:
Используя преобразование T на статоре извилистые напряжения и токи преобразовывают их к dq0 и системам координат xy, которые независимы от угла ротора:
и
Применение этого преобразования к первым двум электрическим уравнениям производит следующие уравнения, которые задают поведение блока:
и
где:
Ld = Ls + Ms + 5/2 Lm. Ld является статором d - составляющая индукции.
Lq = Ls + Ms − 5/2 Lm. Lq является статором q - составляющая индукции.
L0 = Ls – 4Ms. L0 является индуктивностью нулевой последовательности статора.
ω является скоростью вращательного механического устройства ротора.
N является количеством пар полюса постоянного магнита ротора.
Альтернативная параметризация потокосцепления
Можно параметрировать двигатель при помощи коэффициента противо-ЭДС или закрутить константы, которые чаще всего даются в моторных таблицах данных, при помощи опции Permanent magnet flux linkage.
Коэффициент противо-ЭДС, постоянная задан как пиковое напряжение, вызванное постоянным магнитом в каждой скорости вращения фаз на модуль. Это связано с пиковым потокосцеплением постоянного магнита:
Из этого определения, из этого следует, что коэффициентом противо-ЭДС, eph, для одной фазы дают:
Постоянный крутящий момент задан как пиковый крутящий момент, вызванный каждым током фаз на модуль. Это численно идентично в значении коэффициенту противо-ЭДС, постоянной, когда оба описываются в единицах СИ:
Когда Ld = Lq, и когда токи во всех пяти фазах сбалансированы, из этого следует, что объединенным крутящим моментом T дают:
где Ipk является максимальным током в любой из этих трех обмоток.
Фактор 5/2 вычисляется от установившейся суммы крутящих моментов от всех фаз. Поэтому крутящий момент постоянный kt мог также быть задан как:
где T является измеренным общим крутящим моментом при тестировании со сбалансированным трехфазным током с пиковым линейным напряжением Ipk. Линейное напряжение RMS измеряется как:
Порты
Сохранение
развернуть все
a — a - фаза
электрический
Электрический порт сохранения, сопоставленный с a - фаза.
b — b - фаза
электрический
Электрический порт сохранения, сопоставленный с b - фаза.
c — c - фаза
электрический
Электрический порт сохранения, сопоставленный с c - фаза.
d — d - фаза
электрический
Электрический порт сохранения, сопоставленный с d - фаза.
e — e - фаза
электрический
Электрический порт сохранения, сопоставленный с e - фаза.
n — Нейтральная фаза
электрический
Электрический порт сохранения сопоставлен с нейтральной фазой.
R — Моторный ротор
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным ротором.
C — Моторный случай
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным случаем.
Параметры
развернуть все
Основной
Winding type — Настройка обмоток
Star-wound (значение по умолчанию) | Pentagon-wound | Pentacle-wound
Настройка для обмоток:
Star-wound — Обмотки являются звездообразной раной.
Pentagon-wound — Обмотки являются пятигранной раной. a - фаза соединяется между портами a и b, b - фазой между портами b и c, c - фазой между портами c и d, d - фазой между портами d и e и e - фаза между портами e и a.
Pentacle-wound — Обмотки являются раной магической фигуры. a - фаза соединяется между портами a и d, b - фазой между портами b и e, c - фазой между портами c и a, d - фазой между портами d и b и e - фаза между портами e и c.
Number of pole pairs Количество пар полюсов
6
Количество постоянного магнита подпирает пары шестами на роторе.
Permanent magnet flux linkage parameterization — Параметризация потокосцепления постоянного магнита
Specify flux linkage (значение по умолчанию) | Specify torque constant | Specify back EMF constant
Потокосцепление постоянного магнита в виде Specify flux linkage, Specify torque constant, или Specify back EMF constant.
Permanent magnet flux linkage — Потокосцепление постоянного магнита
0.03 Wb (значение по умолчанию)
Пиковое потокосцепление постоянного магнита с любой из обмоток статора.
Зависимости
Чтобы включить этот параметр, установите Permanent magnet flux linkage на Specify flux linkage.
Torque constant — Постоянный крутящий момент
0.18 N*m/A (значение по умолчанию)
Крутящий момент, постоянный с любой из обмоток статора.
Зависимости
Чтобы включить этот параметр, установите Permanent magnet flux linkage на Specify torque constant.
Back EMF constant — Коэффициент противо-ЭДС, постоянная
0.18 V/(rad/s) (значение по умолчанию)
Коэффициент противо-ЭДС, постоянная с любой из обмоток статора.
Зависимости
Чтобы включить этот параметр, установите Permanent magnet flux linkage на Specify back EMF constant.
Stator parameterization — Параметризация статора
Specify Ld, Lq, and L0 (значение по умолчанию) | Specify Ls, Lm, and Ms
Параметризация статора в виде Specify Ld, Lq, and L0 или Specify Ls, Lm, and Ms.
Stator d-axis inductance, Ld — Статор d - составляющая индукции
0.00019 H (значение по умолчанию)
d-.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0.
Stator q-axis inductance, Lq — Статор q - составляющая индукции
0.00025 H (значение по умолчанию)
q-.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ld, Lq, and L0.
Stator zero-sequence inductance, L0 — Индуктивность нулевой последовательности статора
0.00016 H (значение по умолчанию)
Индуктивность нулевой последовательности.
Зависимости
Включить этот параметр также:
Установите Winding Type на Star-wound, Zero sequence к Include, и Stator parameterization к Specify Ld, Lq, and L0.
Установите Winding Type на Pentagon-wound.
Установите Winding Type на Pentacle-wound.
Stator self-inductance per phase, Ls — Самоиндукция статора на фазу
0.0002 H (значение по умолчанию)
Средняя самоиндукция каждой из пяти обмоток статора.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ls, Lm, and Ms.
Stator inductance fluctuation, Lm — Колебание индуктивности статора
-0.00002 H (значение по умолчанию)
Колебание самоиндукции и взаимной индуктивности обмоток статора с углом ротора.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ls, Lm, and Ms.
Stator mutual inductance, Ms — Статор взаимная индуктивность
0.00002 H (значение по умолчанию)
Средняя взаимная индуктивность между обмотками статора.
Зависимости
Чтобы включить этот параметр, установите Stator parameterization на Specify Ls, Lm, and Ms.
Stator resistance per phase, Rs — Сопротивление статора на фазу
0.013 Ohm (значение по умолчанию)
Сопротивление каждой из обмоток статора.
Zero sequence — Нулевая опция последовательности
Include (значение по умолчанию) | Exclude
Включать ли или исключить условия нулевой последовательности.
Include — Включайте условия нулевой последовательности. Чтобы приоритизировать точность модели, используйте эту настройку по умолчанию. Используя эту опцию:
Exclude — Исключите условия нулевой последовательности. Чтобы приоритизировать скорость симуляции для настольной симуляции или развертывания приложений, выберите эту опцию.
Зависимости
Чтобы включить этот параметр, установите Winding Type на Star-wound.
Rotor angle definition — Контрольная точка для углового измерения ротора
Angle between the a-phase magnetic axis and the d-axis (значение по умолчанию) | Angle between the a-phase magnetic axis and the q-axis
Контрольная точка для углового измерения ротора. Значением по умолчанию является Angle between the a-phase magnetic axis and the d-axis. Это определение показывают на Моторном рисунке Конструкции. Когда вы выбираете это значение, ротор и a - потоки фазы выравниваются, когда угол ротора является нулем.
Другим значением, которое можно выбрать для этого параметра, является Angle between the a-phase magnetic axis and the q-axis. Когда вы выбираете это значение, a - текущая фаза генерирует максимальный крутящий момент, когда угол ротора является нулем.
Механическое устройство
Rotor inertia — Инерция ротора
0.01
kg*m^2 (значение по умолчанию)
Инерция ротора присоединяется к механическому поступательному порту R. Значение может быть нулем.
Rotor damping — Затухание ротора
0 N*m/(rad/s) (значение по умолчанию)
Ссылки
[1] Л. Парса и Х. А. Толиьят. Sensorless Прямое Управление Крутящим моментом Пятифазовых Внутренних Дисков Электродвигателя с постоянным магнитом. Транзакции IEEE на Промышленных Приложениях, издании 43, № 4, pp.952-959, июль-август 2007.
[2] Андерсон, пополудни анализ неработающих энергосистем. IEEE нажимает Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2020a