Шестифазовый постоянный магнит синхронный двигатель с синусоидальным распределением потока
Simscape / Электрический / Электромеханический / Постоянный магнит
Блок PMSM (Six-Phase) моделирует постоянный магнит синхронную машину (PMSM) с шестифазовым статором звездообразной раны.
Шестифазовый PMSM имеет две группы трехфазных обмоток статора: группа ABC и группа XYZ. У этих двух групп есть 30 сдвигов фазы степени.
Рисунок показывает эквивалентную электрическую схему для обмоток статора.
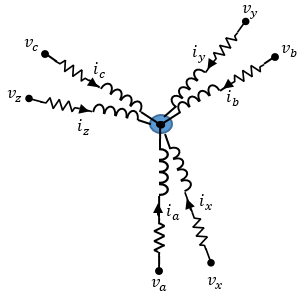
Напряжения через обмотки статора заданы:
где:
va, vb и vc являются отдельными напряжениями фазы от порта ~ABC до нейтрального порта n1.
vx, vy и vz являются отдельными напряжениями фазы от порта ~XYZ до нейтрального порта n2.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими из порта ~ABC к порту n1.
ix, iy и iz являются токами, текущими из порта ~XYZ к порту n2.
и скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти шесть обмоток способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан:
где:
ψa, ψb, ψc, ψx, ψy и ψz являются общими потоками, которые соединяют каждую обмотку статора.
Laa, Lbb, Lcc, Lxx, Lyy и Lzz являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и так далее, является взаимной индуктивностью обмоток статора.
ψam, ψbm, ψcm, ψxm, ψym и ψzm являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями ротора электрический угол, заданный:
где:
θr является углом механического устройства ротора.
θe является ротором электрический угол.
rotor offset является 0 если вы задаете ротор электрический угол относительно d - ось или -pi/2 если вы задаете ротор электрический угол относительно q - ось.
Ls является статором самоиндукция на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является колебанием самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Поток постоянного магнита, соединяющий извилистый a-a', в максимуме когда θe = 0 ° и нуль когда θe = 90 °. Поэтому соединенный моторный поток задан:
где ψm является потокосцеплением постоянного магнита.
Применение разъединенного преобразования с блоком, электрические уравнения производят выражение для крутящего момента, который независим от угла ротора.
Разъединенное преобразование задано:
Матрица преобразования, P, имеет это псевдоортогональное свойство:
Используя разъединенное преобразование на статоре извилистые напряжения и токи преобразовывают их к системе координат dq0, которая независима от угла ротора.
Чтобы получить d - ось, q - ось, и напряжения статора нулевой последовательности и потокосцепления для ABC и групп XYZ, применяют преобразование к уравнения потокосцепления и напряжению:
где:
vd, vq, vz1, vz2, v01 и v02 является d, q, z1, и компоненты z2 и напряжения статора нулевой последовательности для ABC и групп XYZ, заданных:
id, iq, iz1, iz2, i01 и i02 является d - ось, q - ось и токи статора нулевой последовательности для ABC и групп XYZ, заданных:
статор d - составляющая индукции.
статор q - составляющая индукции.
индуктивность нулевой последовательности статора.
ω является скоростью вращательного механического устройства ротора.
N является количеством пар полюса постоянного магнита ротора.
Уравнение крутящего момента определено:
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
[1] Краузе, Пол, Олег Васынцзук, Скотт Садхофф, и Стивен Пекэрек, анализ редакторов электрического машинного оборудования и систем приводов. Хобокен, NJ, США: John Wiley & Sons, Inc., 2013. https://doi.org/10.1002/9781118524336.
[2] Су, Цзянь Ён, Чжин Бо Янг и Гуй Цзе Ян. Исследование в области Векторного Управления и Метода PWM Шестифазового PMSM. Усовершенствованное Исследование Материалов 516–517 (май 2012): 1626–31. https://doi.org/10.4028/www.scientific.net/AMR.516-517.1626.


