

Следующий пример демонстрирует, как импортировать простую лестничную схему из .L5X файл (simpleController.L5X) в среду Simulink® и затем генерируют код С из импортированной модели. У вас должны быть допустимая лицензия Simulink Coder™ и необходимые компиляторы, чтобы сгенерировать код С из модели. Для получения дополнительной информации смотрите Начало работы с Simulink Coder (Simulink Coder).
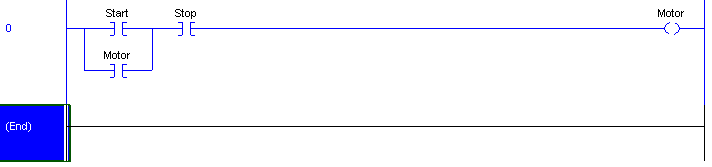
.L5X файл был создан с помощью RSLogix™ 5000 IDE и содержит контакты и переключатели представления обмоток и двигатель. Следующее является снимком состояния лестничной структуры.
Используйте plcladderimport функционируйте, чтобы импортировать лестничную структуру в Simulink.
[mdlName,mdlLib,busScript] = plcimportladder('simpleController.L5X','OpenModel','On')
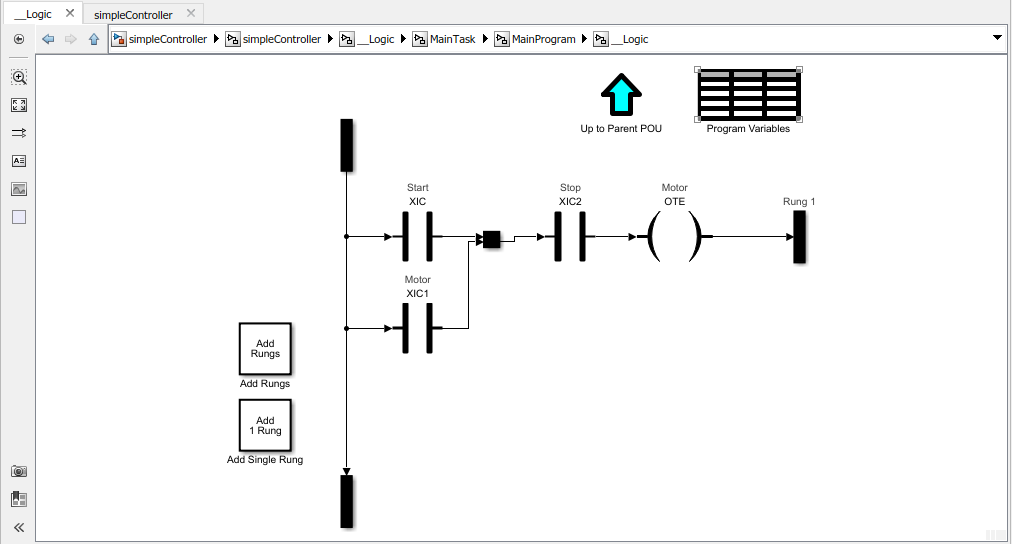
Импортированная модель содержит блок PLC Controller под названием simpleController, сопровождаемый блоком Task под названием MainTask и наконец блок Ladder Diagram Program под названием MainProgram. Модель, импортированная в Simulink, имеет блоки, которые реализуют функциональность контактов и обмоток.
Сгенерировать код С для подсистемы, simpleController/simpleController необходимо сначала включить 'FastSim' опция для модели Simulink Ladder Diagram.
currentState = plcladderoption('simpleController/simpleController','FastSim','on');
Откройте диалоговое окно Configuration Parameters от редактора моделей путем нажатия на Modeling> Model Settings.
Альтернативно, введите следующие команды в командной строке MATLAB®.
cs = getActiveConfigSet(model); openDialog(cs);
Убедитесь, что выбран допустимый Toolchain.
В окне модели инициируйте генерацию кода и процесс сборки для модели при помощи любой из следующих опций:
Нажмите кнопку Build Model.
Нажмите Ctrl+B.
В галерее Apps, под Генерацией кода, нажимают Embedded Coder. Вкладка C Code открывается. Выберите Build> Build.
Вызовите rtwbuild команда из командной строки MATLAB.
plccleartypes | plcgeneratecode | plcgeneraterunnertb | plcimportladder | plcladderlib | plcladderoption | plcloadtypes