Программное обеспечение Robust Control Toolbox™ обеспечивает инструменты, чтобы смоделировать неопределенную динамику в Simulink®. Используя эти инструменты, можно анализировать, как неопределенность влияет на во временной области и частотной области поведение модели Simulink.
Блок Uncertain State Space, включенный в библиотеку блоков Robust Control Toolbox, является удобным способом включить информацию о неопределенности в модель Simulink. Для получения дополнительной информации смотрите, Задают Неопределенность Используя Неопределенные Блоки Пространства состояний. Используя этот блок, можно выполнить следующие типы анализа:
Варьируйтесь неопределенность и смотрите, как она влияет на ответы времени (анализ Монте-Карло). Смотрите Симулируют Эффекты Неопределенности.
Анализируйте эффекты неопределенности на линеаризовавшей динамике:
Если рабочая точка не зависит от неопределенности параметра, использовать ulinearize получить неопределенную модель в пространстве состояний. Можно затем использовать usample произвести неопределенные переменные и получить семейство моделей LTI.
Если рабочая точка зависит от неопределенности параметра, использовать usample производить неопределенность и затем использовать Simulink Control Design™
linearize (Simulink Control Design) команда, чтобы вычислить линеаризовавшую динамику для каждого значения неопределенности.
Смотрите, как варьироваться значения неопределенности и получить неопределенную модель в пространстве состояний из модели Simulink.
Вычислите неопределенную линеаризацию, i.e., получите неопределенную модель в пространстве состояний (uss объект), который комбинирует неопределенные переменные с линеаризовавшей динамикой. Можно использовать эту модель, чтобы выполнить анализ робастности худшего случая. Смотрите Получают Неопределенную Модель в пространстве состояний из Модели Simulink.
Если вы не можете использовать блоки Uncertain State Space в модели Simulink, потому что вы совместно используете модель или генерируете код, можно все еще вычислить неопределенную линеаризацию путем определения блока, чтобы линеаризовать к неопределенной переменной. Например, можно задать блок усиления, чтобы линеаризовать к неопределенному действительному параметру (ureal). Смотрите Задают Неопределенную Линеаризацию для Базовых или Пользовательских блоков Simulink. Можно затем использовать неопределенную модель в пространстве состояний, чтобы анализировать робастность в линейном рабочем диапазоне.
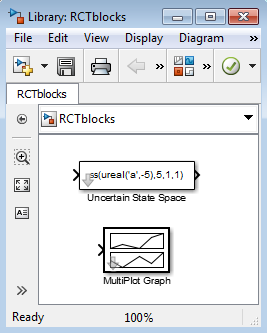
Программное обеспечение Robust Control Toolbox обеспечивает блок Uncertain State Space, чтобы смоделировать параметрическую и динамическую неопределенность в Simulink. Библиотека блоков также содержит блок MultiPlot Graph, который вы используете с блоком Uncertain State Space, чтобы построить и визуализировать ответы симуляции Монте-Карло.
Чтобы открыть библиотеку блоков Robust Control Toolbox, введите следующую команду в подсказке MATLAB®:
RCTblocks
Библиотека блоков открывается как показано в следующем рисунке.
В качестве альтернативы в окне модели Simulink, щелкните![]() , чтобы запуститься к Браузеру Библиотеки. В Браузере Библиотеки выберите Robust Control Toolbox.
, чтобы запуститься к Браузеру Библиотеки. В Браузере Библиотеки выберите Robust Control Toolbox.
ulinearize | Uncertain State Space | linearize (Simulink Control Design)
