

Режим external mode позволяет моделям Simulink® на вашем хосте - компьютере связаться с развернутой моделью на вашем оборудовании робота во время времени выполнения. Используйте режим external mode, чтобы просмотреть сигналы или изменить параметры маски блока на вашей развернутой модели Simulink. Параметр, настраивающийся с режимом external mode, помогает вам внести изменения в свои алгоритмы, когда они работают на оборудовании в противоположность в симуляции в самом Simulink. В этом примере показано, как использовать режим external mode с Управлением с обратной связью поддерживающего ROS примера Робота, когда модель развертывается на оборудовании робота.
Сконфигурируйте модель Simulink, чтобы развернуться к оборудованию робота и включить режим external mode.
Откройте модель.
robotROSFeedbackControlExample
Установите параметры конфигурации модели.
Во вкладке Modelling на панели инструментов выберите Model Settings, чтобы открыть диалоговое окно Configuration Parameters.
На панели Solver, набор Type к Fixed-step и Fixed-step size к 0.05.
На панели Hardware Implementation задайте Hardware board как Robot Operating System (ROS). Задайте связанные параметры в Target Hardware Resources.
В Build Options, набор Build action к Build and run. По умолчанию Simulink всегда использует Build and run при использовании режима external mode.
В Target Hardware Resources, установленном параметры External mode. Чтобы приоритизировать скорость выполнения модели, включите Run external mode in a background thread.
В модели, набор Simulation mode к External.
В модели добавьте блоки осциллографа в сигналы, которые вы хотите просмотреть. В данном примере добавьте XY Graph (Simulink) осциллограф к X и Y сигналы, которые выходят из Bus Selector от подписчика ROS, который контролирует положение робота. Откройте блок XY Graph и измените минимальные и максимальные значения для каждой оси к [-10 10].
Теперь, когда модель сконфигурирована, можно развернуть и запустить модель на оборудовании робота.
Соединитесь с сетью ROS путем установки сетевого адреса. Сеть должна работать на вашем целевом оборудовании робототехники. Этот пример использует "Gazebo, Пустая" среда средства моделирования используется от Виртуальной машины с Гидро ROS и пример Gazebo. В Simulations вкладка выбирают ROS Network, чтобы сконфигурировать ваш адрес сети ROS. Задайте свой адрес устройства путем выбора Custom под Network Address и определением IP-адреса или имени хоста под Hostname/IP Address. Для этой виртуальной машины IP-адресом является 192.168.154.131.
Запустите модель. Модель развертывается на оборудовании робота и выполняется после процесса сборки, завершено. Этот шаг может занять время.
После того, как вы развертываете модель, и модель запускается, можно просмотреть ее сигналы и изменить ее параметры.
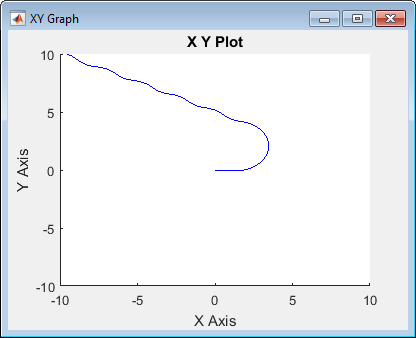
В то время как модель работает на оборудовании, просмотрите окно XY Graph (Simulink), чтобы контролировать положение робота в зависимости от времени.
Путь имеет небольшое колебание, которое происходит из-за высокой скорости робота, когда это отслеживает путь.
В то время как модель все еще запускается, вы можете также настройки параметров. Откройте Proportional Controller подсистема и изменение ползунок Linear Velocity к 0.25. Назад в основной модели, измените Desired Position постоянный блок в новое положение, [0 -5]. Робот управляет к новой позиции медленнее.
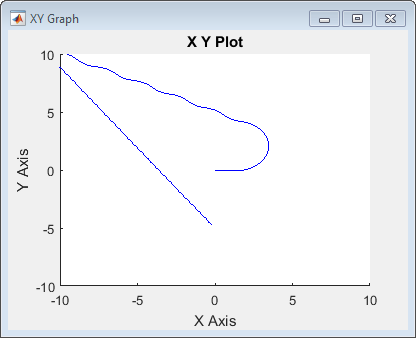
Пониженная скорость уменьшает колебание вдоль пути. Все эти модификации были сделаны, в то время как модель была развернута на оборудовании.