

Использовать автонастройку ПИД-регулятора для объекта смоделировало в Simulink®, вы включаете блок автотюнера ПИДа в модель. Можно управлять процессом автоматической настройки, в то время как модель запускается. Когда настройка завершена, можно подтвердить настроенные параметры контроллера против симулированного объекта. Используя автонастройку ПИД-регулятора этот путь может быть полезен для генерации первоначального проекта ПИДа, который вы позже совершенствовали с автоматической настройкой в реальном времени.
Следующие шаги предоставляют общий обзор рабочего процесса для автонастройки ПИД-регулятора в Simulink с помощью блоков Open-Loop PID Autotuner или Closed-Loop PID Autotuner.
Включите блок автотюнера ПИДа в свою модель между ПИД-регулятором и объектом.
Сконфигурируйте запустить/остановить сигнал, который управляет, когда настраивающийся эксперимент начинается и заканчивается.
Задайте параметры контроллера, такие как тип контроллера и целевая пропускная способность для настройки.
Сконфигурируйте параметры эксперимента, такие как амплитуды возмущений, введенных во время эксперимента частотной характеристики.
Запустите модель и инициируйте настройку. Используйте запустить/остановить сигнал инициировать процесс автонастройки ПИД-регулятора. Когда вы запускаете процесс, блок автотюнера вводит тестовые сигналы и измеряет ответ объекта.
Остановите эксперимент с запустить/остановить сигналом. Когда эксперимент останавливается, блок автотюнера вычисляет и возвращает настроенные коэффициенты ПИД. Можно исследовать настроенные усиления на обоснованность.
Передайте настроенные усиления с блока автотюнера на ваш ПИД-регулятор. Можно затем подтвердить эффективность настроенного контроллера в Simulink.
Следующий рисунок показывает один способ включить блок Closed-Loop PID Autotuner, промежуточный ваш ПИД-регулятор и ваш объект.
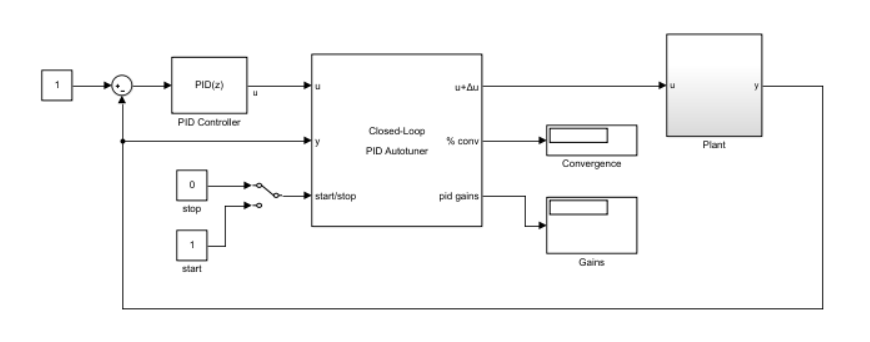
Управляющий сигнал u от ПИД-регулятора питается в порт u блока автотюнера. Порт u+Δu питается в объект введенный. Прежде чем вы начнете процесс автоматической настройки, блок автотюнера питает управляющий сигнал ПИДа непосредственно от u до u+Δu и входа объекта. В том состоянии блок автотюнера не оказывает влияния на поведение контроллера или объект. Во время процесса автоматической настройки блок вводит тестовые сигналы во входе объекта и измеряет ответ в y.
start/stop предупредите о средствах управления, когда процесс автоматической настройки начинается и концы (см. Шаг 2. Сконфигурируйте Запускают/Останавливают Сигнал). Когда эксперимент заканчивается, блок вычисляет коэффициенты ПИД и возвращает их в pid gains порт.
Для более подробного примера модели Simulink, сконфигурированной для автонастройки ПИД-регулятора с обратной связью, смотрите ПИД-регулятор Мелодии в режиме реального времени Используя Блок Автотюнера ПИДа С обратной связью.
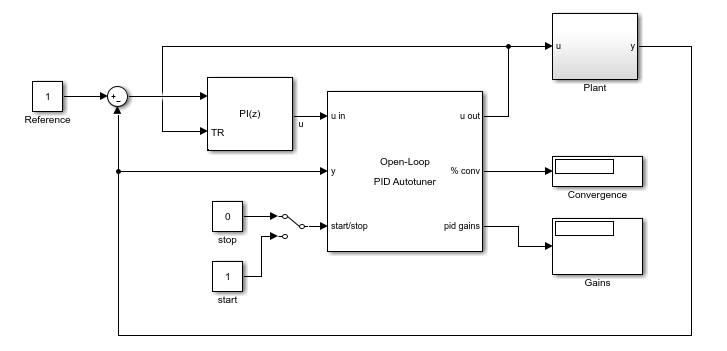
Блок Open-Loop PID Autotuner открывает цикл между u и u+Δu во время эксперимента оценки. Если ваш контроллер включает интегральное действие, можно использовать отслеживание сигнала, чтобы избежать завершения интегратора, в то время как цикл открыт. Отслеживание сигнала позволяет ПИД-регулятору продолжить отслеживать действительный вход объекта, в то время как это вне цикла. Без него ваша система может испытать удар, когда цикл управления закрывается в конце настраивающего процесса. В системе следующего рисунка ПИД-регулятор является блоком Simulink PID Controller параметром Enable tracking mode на. Объект ввел подачу во вход отслеживания блока контроллера.
Для более подробного примера модели Simulink, сконфигурированной для автонастройки ПИД-регулятора разомкнутого контура, смотрите ПИД-регулятор Мелодии в режиме реального времени Используя Блок Автотюнера ПИДа Разомкнутого контура.
Чтобы запустить и остановить процесс автоматической настройки, используйте сигнал в start/stop порт. Когда эксперимент не запускается, сигналы передач блока, неизменные от u до u+Δu. В этом состоянии блок не оказывает влияния на поведение контроллера или объект.
Эксперимент оценки частотной характеристики начинается и заканчивается, когда блок получает повышение или падающий сигнал в start/stop порт, соответственно. В системах, проиллюстрированных на Шаге 1. Включите Автотюнер в Модель, запустить/остановить сигнал является простым переключателем. В то время как модель запускается, можно использовать переключатель, чтобы начать и закончить эксперимент. Когда вы заканчиваете эксперимент, алгоритм генерирует настроенные коэффициенты ПИД, и блок возвращает их в pid gains порт.
Как альтернатива ручному переключателю, можно сконфигурировать start/stop сигнал начаться и закончить эксперимент автоматически в конкретных временах симуляции. Например, можно использовать сумму двух блоков Step: Сконфигурируйте один блок Step, чтобы продвинуться от 0 до 1 во время начала эксперимента и второй блок Step, чтобы продвинуться от 1 до 0 во время окончания. Питайте сумму двух сигналов в start/stop порт блока автотюнера ПИДа.
Можно сконфигурировать любую другую логику, подходящую для приложения, чтобы управлять запуском и временами остановки эксперимента. Для получения дополнительной информации о том, когда запустить и остановить эксперимент, смотрите Шаг 5. Запустите Модель и Инициируйте Настраивающийся Эксперимент.
В блоке автотюнера ПИДа задайте настройку ПИД-регулятора, который вы настраиваете, с помощью следующих параметров блоков:
Type
Form
Time Domain
Controller sample time (sec)
Integrator method
Filter method
Затем задайте целевую пропускную способность и запас по фазе для настройки с Target bandwidth (rad/sec) и параметрами Target phase margin (degrees), соответственно.
Целевая пропускная способность, заданная в рад/секунда, является целевым значением для частоты среза с 0 усилениями дБ настроенного ответа разомкнутого контура CP, где P является ответом объекта, и C является ответом контроллера. Эта частота среза примерно устанавливает пропускную способность управления. Для желаемого времени нарастания секунды τ хорошее предположение для целевой пропускной способности является 2/τ рад/секунда.
Целевой запас по фазе отражает вашу желаемую робастность настроенной системы. Как правило, выберите значение в области значений приблизительно 45 °– 60 °. В общем случае более высокий запас по фазе улучшает перерегулирование, но может ограничить скорость ответа. Значение по умолчанию, 60 °, имеет тенденцию балансировать эффективность и робастность, давая приблизительно к 5-10%-му перерегулированию, в зависимости от характеристик вашего объекта.
Для получения дополнительной информации об установке этих параметров, смотрите страницы с описанием блока Closed-Loop PID Autotuner или Open-Loop PID Autotuner.
Эксперимент оценки частотной характеристики вводит синусоидальные сигналы на частотах вокруг целевой пропускной способности ωc:
[1/3, 1, 3, 10] ωc для блока Open-Loop PID Autotuner
[1/10,1/3, 1, 3, 10] ωc для блока Closed-Loop PID Autotuner
Используйте параметр Sine Amplitudes блоков, чтобы задать амплитуды этих сигналов.
Если ваш объект асимптотически устойчив, блок Open-Loop PID Autotuner может оценить усиление DC объекта с возмущением шага. Задайте амплитуду этого возмущения параметром Step Amplitude . Если ваш объект имеет один интегратор, очистите параметр Estimate DC gain with step signal.
Внимание
Не используйте или автонастройку ПИД-регулятора или разомкнутого контура с обратной связью с нестабильным объектом.
Не используйте автонастройку ПИД-регулятора разомкнутого контура с объектом, который имеет больше чем один интегратор. Можно использовать автонастройку ПИД-регулятора с обратной связью с объектом нескольких-интеграторов.
Все амплитуды возмущения должны быть:
Достаточно большой, что возмущение преодолевает любую мертвую зону в приводе объекта и генерирует ответ выше уровня шума.
Достаточно маленький, чтобы поддерживать объект в рабочем состоянии приблизительно в линейной области около номинальной рабочей точки и постараться не насыщать ввод или вывод объекта.
Для получения дополнительной информации об установке параметров эксперимента, смотрите страницы с описанием блока Closed-Loop PID Autotuner и Open-Loop PID Autotuner.
После того, как вы сконфигурируете все параметры для настройки, запустите модель.
Если вы сконфигурировали ручной start/stop предупредите, начните эксперимент, когда ваш объект достигнет установившийся.
Если вы сконфигурировали start/stop сигнал начаться и закончить настраивающий процесс в конкретные моменты времени, позвольте симуляции запускаться достаточно долго, чтобы начать эксперимент.
Оценка частотной характеристики экспериментирует концы когда start/stop падения сигнала.
Если вы сконфигурировали ручной start/stop сигнал, закончите эксперимент когда сигнал в % conv выведите стабилизирует близкие 100%.
Если вы сконфигурировали start/stop сигнал начаться и закончить настраивающий процесс в конкретные моменты времени, позвольте симуляции пробегать конец эксперимента.
Или в случае, осторожная оценка в течение времени эксперимента является 200/ωc для настройки с обратной связью или в 100/ωc для настройки разомкнутого контура, где ωc является вашей целевой пропускной способностью.
Когда вы останавливаете эксперимент, блок вычисляет новые коэффициенты ПИД на основе предполагаемой частотной характеристики системы и ваших заданных настраивающих целей. Исследуйте их на обоснованность. Например, если у вас будет начальный ПИД-регулятор, вы можете ожидать, что настроенные усиления будут примерно той же величиной как усиления первоначального проекта. Существует несколько способов видеть настроенные усиления:
Просмотрите вывод pid gains порт блока автотюнера. Один способ просмотреть этот вывод состоит в том, чтобы соединить выход с блоком Simulink Display.
В блоке, во вкладке Block, нажимают Export to MATLAB. Блок создает структуру в рабочей области MATLAB®, OnlinePIDTuningResult. Для получения дополнительной информации о содержимом этой структуры, смотрите страницы с описанием блока Closed-Loop PID Autotuner или Open-Loop PID Autotuner.
Блок автотюнера может записать настроенные параметры контроллера непосредственно в блок ПИД-регулятора, если ваш ПИД-регулятор также:
Блок Simulink PID Controller.
Пользовательский ПИД-регулятор, для которого следующие условия оба верны:
Пользовательский контроллер является подсистемой маскированной.
Коэффициенты ПИД являются параметрами маски под названием PiD, и N. (Вы не должны использовать все четыре параметра. Например, если вы используете пользовательский ПИ-контроллер, затем вам только нужны параметры маски P и I.)
Чтобы сконфигурировать блок автотюнера, чтобы записать настроенные усиления вашему контроллеру, назначьте контроллер как associated PID block в параметрах блоков автотюнера ПИДа. (Для получения дополнительной информации смотрите видение страниц с описанием блока Closed-Loop PID Autotuner или Open-Loop PID Autotuner.) Затем обновите свой контроллер путем нажатия на Update PID Block. Можно обновить коэффициенты ПИД, в то время как симуляция запускается. Выполнение так полезно для того, чтобы сразу подтвердить настроенные коэффициенты ПИД.
Примечание
В любое время в процессе моделирования можно изменить параметры настройки или эксперимента, запустить эксперимент снова и продвинуть новые настроенные усиления с блоком PID. Можно затем наблюдать поведение объекта, когда симуляция продолжает новые усиления.
Если ваш пользовательский ПИД-регулятор не удовлетворяет условиям для прямого обновления, необходимо передать настроенные усиления контроллеру некоторый другой путь, такой как вручную или с собственной логикой.
Когда вы исследуете эти усиления и передаете их вашему собственному контроллеру, знать о значении этих усилений в блоках автотюнера ПИДа. В дискретное время блоки принимают следующую передаточную функцию ПИД-регулятора:
в параллельной форме, или в идеальной форме,
Fi (z) и Fd (z) зависит от значений, которые вы задаете для Integrator method и формул Filter method, соответственно. Для получения дополнительной информации смотрите страницы с описанием блока Closed-Loop PID Autotuner или Open-Loop PID Autotuner.
Closed-Loop PID Autotuner | Open-Loop PID Autotuner