После того, как вы создадите модель Simulink®, можно ввести параметры конфигурации для модели. Эти параметры управляют многими свойствами модели для симуляции и генерации кода.
Конфигурация модели является именованным набором значений для параметров модели, таких как тип решателя и симуляция запускаются или время остановки. Каждая модель Simulink создается с конфигурацией модели по умолчанию, названной Configuration, это первоначально задает значения по умолчанию для параметров модели. Можно затем создать дополнительные конфигурации модели и сопоставить их с моделью. Для получения дополнительной информации о настройке Simulink, смотрите, Управляют Конфигурациями модели для Модели.
Самый легкий способ задать параметры конфигурации для модели Simulink Desktop Real-Time™ состоит в том, чтобы присвоить конфигурацию модели Simulink Desktop Real-Time по умолчанию программно, как описано в Задают Конфигурацию модели По умолчанию. Можно также установить параметры вручную, как описано во Вводят Параметры конфигурации вручную.
После того, как вы создадите модель Simulink, можно использовать sldrtconfigset функция, чтобы задать конфигурацию модели Simulink Desktop Real-Time по умолчанию для модели. Обычно, использование sldrtconfigset вводит значения параметра конфигурации, которых требует модель.
Следующая процедура использует модель sldrtex_model. Чтобы открыть эту модель, в командном окне MATLAB, введите:
open_system(docpath(fullfile(docroot, 'toolbox', 'sldrt', 'examples', 'sldrtex_model')))
Это принимает, что вы уже загрузили ту модель (см., Создают Модель Simulink).
Если вы уже не имеете сохраненный, модель, на вкладке Simulation, нажимает Save> Save as. В текстовом поле File name введите имя файла для своей модели Simulink и нажмите Save. Например, введите:
sldrtex_model
Программное обеспечение Simulink сохраняет вашу модель в файле sldrtex_model.
В Командном окне MATLAB® введите:
sldrtconfigset('sldrtex_model')
Конфигурация модели Simulink Desktop Real-Time по умолчанию, SimulinkDesktopRealTime, теперь активно для sldrtex_model модель.
Сохраните модель.
Для описания того, как создать ваше приложение Simulink Desktop Real-Time, смотрите, Создают Приложение реального времени.
Чтобы вернуться к конфигурации модели по умолчанию, Настройка или другая конфигурация модели, которую вы имеете для модели, использует Model Explorer. Для описания того, как использовать Model Explorer, см. документацию Simulink.
Ваша модель использует конфигурацию модели Simulink Desktop Real-Time, когда вы изменяете значение System target file в Simulink Desktop Real-Time один, такой как sldrt.tlc или sldrtert.tlc. Программное обеспечение создает конфигурацию модели Simulink Desktop Real-Time, только если каждый не существует.
Параметры конфигурации дают информацию программному обеспечению Simulink для выполнения симуляции.
Эта процедура использует модель sldrtex_model. Чтобы открыть эту модель, в командном окне MATLAB, введите:
open_system(docpath(fullfile(docroot, 'toolbox', 'sldrt', 'examples', 'sldrtex_model')))
Это принимает, что вы уже загрузили ту модель.
На вкладке Desktop Real-Time нажмите Hardware Settings. В диалоговом окне Configuration Parameters кликните по вкладке Solver.
В поле Start time введите 0.0. В поле Stop time введите количество времени, которое вы хотите, чтобы ваша модель запустила. Например, введите 10.0 секунды.
Из списка Type выберите Fixed-step. Simulink Coder™ не поддерживает переменные решатели шага.
Из списка Solver выберите решатель. Например, выберите решатель общего назначения ode5 (Dormand-Prince).
Под Additional options, в поле Fixed step size, вводят шаг расчета. Например, введите 0.001 секунды для частоты дискретизации 1000 выборки/секунда.
Оставьте параметр Treat each discrete rate as a separate task очищенный. (Для моделей с блоками, которые имеют различные шаги расчета, выберите этот параметр.)
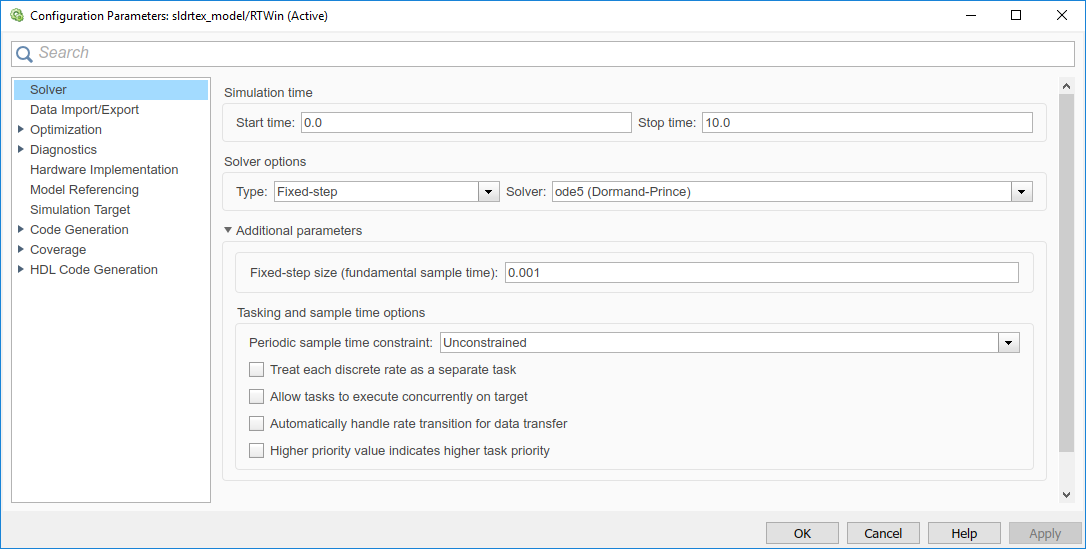
Нажмите OK.
Вы вводите или изменяете параметры осциллографа, чтобы задать ось X и ось Y в окне Scope. Другие свойства включают количество графиков в одном окне Scope и шаге расчета для моделей с дискретными блоками.
После того, как вы добавите блок Scope в свою модель Simulink, можно ввести параметры осциллографа для трассировки сигнала:
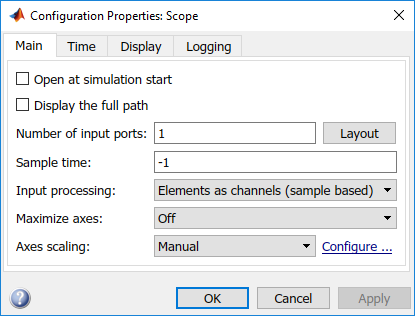
В Редакторе Simulink дважды кликните блок Scope.
На панели инструментов нажмите кнопку Parameters ![]() .
.
Кликните по вкладке Main. В текстовом поле Sample time введите -1, который указывает, что этот блок наследовал свое значение от его родительской модели. Если у вас есть дискретные блоки в вашей модели, введите значение Fixed step size, которое вы ввели в диалоговое окно Configuration Parameters.
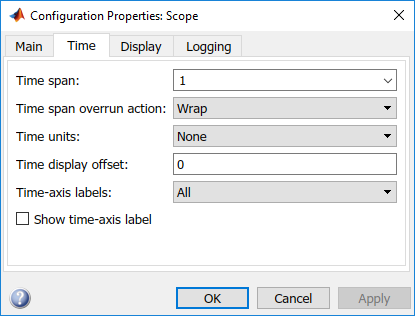
Кликните по вкладке Time. В поле Time span введите 1.
Кликните по вкладке Display. В текстовых полях Y-min и Y-max введите область значений для оси Y в окне Scope. Например, введите -2 и 2.

Нажмите OK.
