Кинематическое регулирование для Акермана, реечного механизма и параллельных рулевых механизмов
Vehicle Dynamics Blockset / регулирование
Блок Kinematic Steering реализует держащуюся модель, чтобы определить левые и правые углы колеса для Акермана, реечного механизма и параллельных рулевых механизмов. Блок использует систему координат транспортного средства.
Чтобы задать держащийся тип, используйте параметр Type.
| Установка | Блокируйте реализацию |
|---|---|
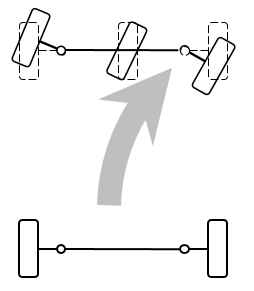
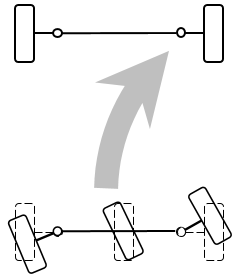
| Идеал Акерман, держащийся. Углы колеса имеют общий центр круга превращения. |
| Идеальное регулирование реечного механизма. Механизмы преобразуют держащееся вращение в линейное движение. |
| Параллельное регулирование. Углы колеса равны. |
Чтобы задать тип данных для рулевого механизма, используйте параметр Parametrized by.
| Установка | Блокируйте реализацию |
|---|---|
| Рулевой механизм использует постоянные данные о параметре. |
| Рулевой механизм реализует таблицы для данных о параметре. |
Используйте параметр Location, чтобы задать переднее или заднее регулирование.
| Установка | Реализация |
|---|---|
| Front |
Переднее регулирование
|
| Rear |
Заднее регулирование
|
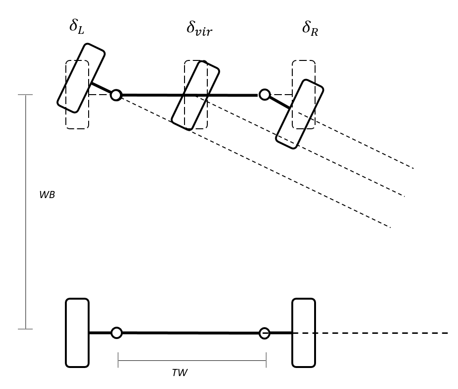
Для идеала Акерман, держащийся, углы колеса имеют общий круг превращения.
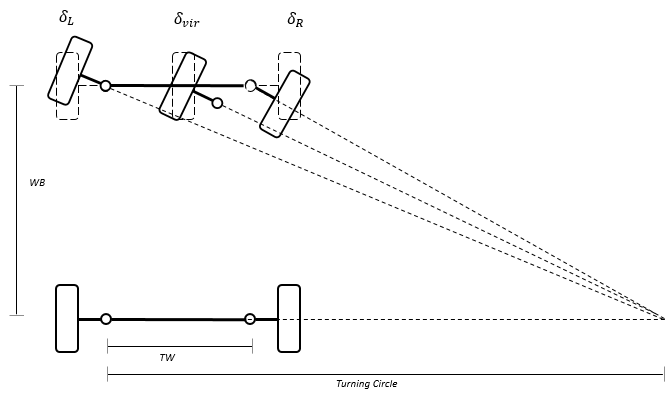
Чтобы вычислить держащиеся углы, блок использует эти уравнения.
Рисунок и уравнения используют эти переменные.
| δin |
Регулирование угла |
| δL |
Оставленный угол колеса |
| δR |
Правильный угол колеса |
| δvir |
Виртуальный угол колеса |
| TW |
Ширина дорожки |
| WB |
Основа колеса |
| γ |
Регулирование отношения |
Для идеального регулирования реечного механизма механизмы преобразуют держащееся вращение в линейное движение.
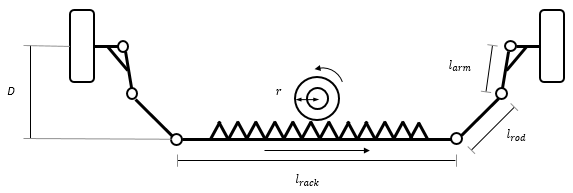
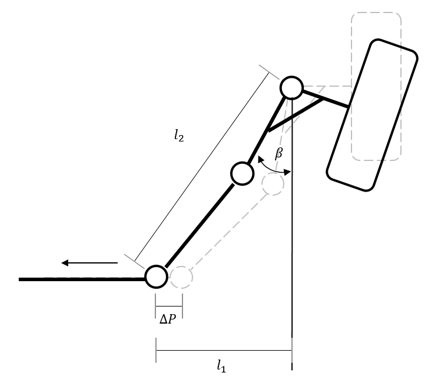
Чтобы вычислить держащиеся углы, блок использует эти уравнения.
Рисунок и уравнения используют эти переменные.
| δin |
Угол руля |
| δL |
Оставленный угол колеса |
| δR |
Правильный угол колеса |
| TW |
Ширина дорожки |
| r |
Свяжите радиус |
| ΔP |
Линейное изменение в положении стойки |
| D |
Расстояние между передней осью и стойкой |
| lrack |
Установите случающуюся длину в стойку |
| larm |
Регулирование длины руки |
| lrod |
Свяжите длину стержня |
Для параллельного регулирования углы колеса равны.
Чтобы вычислить держащиеся углы, блок использует это уравнение.
Рисунок и уравнения используют эти переменные.
| δin |
Угол руля |
| δL |
Оставленный угол колеса |
| δR |
Правильный угол колеса |
| γ |
Регулирование отношения |
Type — Выберите держащийся типAckerman (значение по умолчанию) | Rack and pinion | ParallelЧтобы задать держащийся тип, используйте параметр Type.
| Установка | Блокируйте реализацию |
|---|---|
| Идеал Акерман, держащийся. Углы колеса имеют общий центр круга превращения. |
| Идеальное регулирование реечного механизма. Механизмы преобразуют держащееся вращение в линейное движение. |
| Параллельное регулирование. Углы колеса равны. |
Эта таблица суммирует Type и зависимости от параметра Parametrized by.
| Ввод | Параметрированный | Создает параметры |
|---|---|---|
|
| Constant |
Track width, TrckWdth Wheel base, WhlBase Deadband, Db Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Track width, TrckWdth Wheel base, WhlBase Deadband, Db Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl | |
|
|
|
Track width, TrckWdth Deadband, Db Steering range, StrgRng Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadius |
|
|
Track width, TrckWdth Deadband, Db Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadiusTbl | |
Parallel | Constant |
Deadband, Db Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Deadband, Db Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl |
Parametrized by — Выберите параметризациюConstant (значение по умолчанию) | Lookup tableЧтобы задать тип данных для рулевого механизма, используйте параметр Parametrized by.
| Установка | Блокируйте реализацию |
|---|---|
| Рулевой механизм использует постоянные данные о параметре. |
| Рулевой механизм реализует таблицы для данных о параметре. |
Эта таблица суммирует Type и зависимости от параметра Parametrized by.
| Ввод | Параметрированный | Создает параметры |
|---|---|---|
|
| Constant |
Track width, TrckWdth Wheel base, WhlBase Deadband, Db Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Track width, TrckWdth Wheel base, WhlBase Deadband, Db Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl | |
|
|
|
Track width, TrckWdth Deadband, Db Steering range, StrgRng Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadius |
|
|
Track width, TrckWdth Deadband, Db Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering arm length, StrgArmLngth Rack casing length, RckCsLngth Tie rod length, TieRodLngth Distance between front axis and rack, D Pinion radius, PnnRadiusTbl | |
Parallel | Constant |
Deadband, Db Steering range, StrgRng Steering ratio, StrgRatio |
Lookup table |
Deadband, Db Steering range, StrgRng Steering angle breakpoints, StrgAngBpts Steering ratio table, StrgRatioTbl |
Location — Выберите местоположениеИспользуйте параметр Location, чтобы задать переднее или заднее регулирование.
| Установка | Реализация |
|---|---|
| Front |
Переднее регулирование
|
| Rear |
Заднее регулирование
|
Normalization factor, NrmFctr — Настройте держащийся уголscalarФактор, NrmFctr, что использование блока, чтобы настроить держащееся отношение, γ или радиус шестерни, r. Блок может только нормировать, если вам установили Parametrized by на Constant.
Чтобы настроить держащееся отношение или радиус шестерни, нажмите Normalize.
| Регулирование типа | Нормализация |
|---|---|
| Блок обновляет параметр Steering ratio, StrgRatio к нормированному значению, γnrm, заданному этим уравнением. |
| Блок обновляет параметр Pinion radius, PnnRadius к использованию коэффициента нормализации, NrmFctr. |
Track width, TrckWdth widthscalarШирина дорожки, TW, в m.
Чтобы создать этот параметр, установите Type на Ackerman или Rack and pinion.
Wheel base, WhlBase — ОсноваscalarОснова колеса, WB, в m.
Чтобы создать этот параметр, установите Type на Ackerman.
Deadband, Db — Мертвая зонаscalarРуководящий угол мертвой зоны перед шестерней затрагивает механизм в рад.
Steering range, StrgRng Область значений1.25*pi (значение по умолчанию) | scalarРегулирование области значений, в рад. Блок ограничивает углы колеса, чтобы остаться в держащейся области значений.
Steering ratio, StrgRatio — ОтношениеscalarРегулируя отношение, γ, безразмерный.
Создать этот параметр:
Установите Type на Ackerman или Parallel.
Установите Parametrized by на Constant.
Steering angle breakpoints, StrgAngBpts — Точки остановаvectorРегулирование угловых точек останова, в рад.
Чтобы создать этот параметр, установите Parametrized by на Lookup table.
Steering ratio table, StrgRatioTbl ТаблицаvectorРегулируя таблицу отношения, γ, безразмерный.
Создать этот параметр:
Установите Type на Ackerman или Parallel.
Установите Parametrized by на Lookup table.
Steering arm length, StrgArmLngth длинаscalarРегулируя длину руки, larm, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Rack casing length, RckCsLngth длинаscalarУстановите в стойку случающуюся длину, lrack, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Tie rod length, TieRodLngth длинаscalarСвяжите длину стержня, lrod, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Distance between front axis and rack, D — РасстояниеscalarРасстояние между передней осью и стойкой, D, в m.
Чтобы создать этот параметр, установите Type на Rack and pinion.
Pinion radius, PnnRadius — РадиусscalarСвяжите радиус, r, в m.
Создать этот параметр:
Установите Type на Rack and pinion.
Установите Parametrized by на Constant.
Pinion radius table, PnnRadiusTbl ТаблицаvectorСвяжите таблицу радиуса, r, в m.
Создать этот параметр:
Установите Type на Rack and pinion.
Установите Parametrized by на Lookup table.
[1] Crolla, Дэвид, Дэвид Фостер, и др. Энциклопедия Автомобильной Разработки. Объем 4, Часть 5 (Системы Шасси) и Часть 6 (Электрические и Электронные системы). Чичестер, Западный Сассекс, Соединенное Королевство: John Wiley & Sons Ltd, 2015.
[2] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 1992.
[3] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 2008.