Корпус трейлера с продольным, боковым, и движение отклонения от курса
Vehicle Dynamics Blockset / Кузов
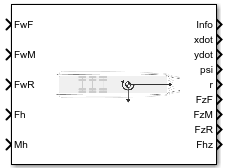
Блок Trailer Body 3DOF реализует твердую 2D ось или модель корпуса трейлера с тремя осями, чтобы вычислить продольный, боковой, и движение отклонения от курса. Сконфигурируйте блок для одной или двойной дорожки. Блок составляет ось, и реакция помехи обеспечивает из-за ускорения трейлера, аэродинамического перетаскивания и регулирования.
Используйте этот блок в динамике аппарата, и автоматизировал ведущие исследования, чтобы смоделировать неголономное движение транспортного средства, когда подача транспортного средства, список и вертикальное движение не являются значительными.
Используйте параметр Vehicle track, чтобы задать количество дорожек.
| Установка дорожки транспортного средства | Реализация |
|---|---|
| Трейлер с одноколейным путем и двумя осями.
|
| Трейлер с двойной дорожкой и двумя осями. Силы действуют в местоположениях твердой точки оси. |
| Трейлер с одноколейным путем и тремя осями.
|
| Трейлер с двойной дорожкой и тремя осями. Силы действуют в местоположениях твердой точки оси. |
Используйте параметр Axle forces, чтобы задать тип силы.
| Ось обеспечивает установку | Реализация |
|---|---|
|
|
|
|
|
|
Чтобы создать дополнительные входные порты, под Input signals, выбирают эти параметры блоков.
Параметр панели входных сигналов | Input port | Описание |
|---|---|---|
Front wheel steering |
| Передний угол колеса, δF |
| Middle wheel steering | WhlAngM | Средний угол колеса, δM |
| Rear wheel steering | WhlAngR | Задний угол колеса, δR |
External wind |
| Скорость ветра, WX, WY и WZ, в инерционной системе координат |
| External friction | Mu | Коэффициент трения |
| External forces | FExt | Внешняя сила на центре тяжести транспортного средства (CG), Fx, Fy и Fz, в зафиксированной транспортным средством системе координат |
| External moments |
| Внешний момент о CG транспортного средства, Mx, My и Mz, в зафиксированной транспортным средством системе координат |
| Hitch forces | Fh | Цепляйтесь сила применилась к телу в местоположении помехи, Fhx, Fhy и Fhz, в зафиксированной транспортным средством системе координат |
| Hitch moments | Mh | Цепляйте момент в местоположении помехи, Mhx, Mhy и Mhz, о зафиксированной транспортным средством системе координат |
Initial longitudinal position |
| Начальное смещение CG транспортного средства вдоль зафиксированной землей Оси X |
Initial yaw angle |
| Начальное вращение зафиксированной транспортным средством системы координат о зафиксированной землей оси Z (отклонение от курса) |
Initial longitudinal velocity |
| Начальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси X |
Initial yaw rate |
| Начальная скорость вращения транспортного средства о зафиксированной транспортным средством оси z (уровень отклонения от курса) |
Initial lateral position |
| Начальное смещение CG транспортного средства вдоль зафиксированной землей Оси Y |
Air temperature | AirTemp | Температура окружающего воздуха. Рассмотрите эту возможность, если вы хотите варьироваться температура в течение времени выполнения. |
Initial lateral velocity |
| Начальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси Y |
Чтобы определить движение транспортного средства, блок решает твердое тело плоские уравнения динамики движения.
| Вычисление | Описание |
|---|---|
Динамика | Блок решает твердое тело плоские уравнения динамики, чтобы определить транспортное средство продольное движение. Если вы устанавливаете Axle forces на |
Внешние силы | Внешние силы включают и перетаскивают и внешние входные параметры силы. Силы действуют на CG транспортного средства. Блок делит нормальные силы на номинальную нормальную загрузку, чтобы варьироваться эффективные параметры трения во время передачи загрузки и веса. Блок обеспечивает равновесие продольного и поперечного крена. |
Утомите силы | Блок использует отношение локальных, продольных, и боковых скоростей, чтобы определить углы промаха. Блок использует держащиеся углы, чтобы преобразовать силы шины к зафиксированной транспортным средством системе координат. Если вы устанавливаете Axle forces на |
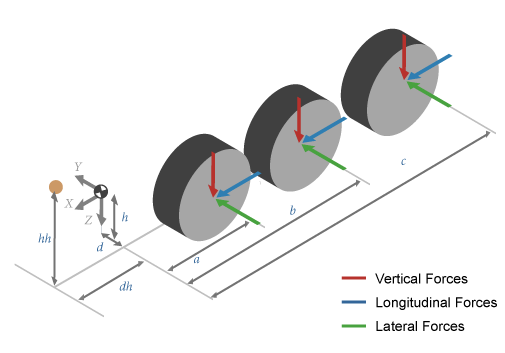
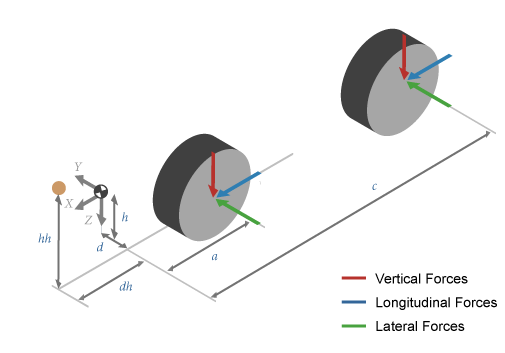
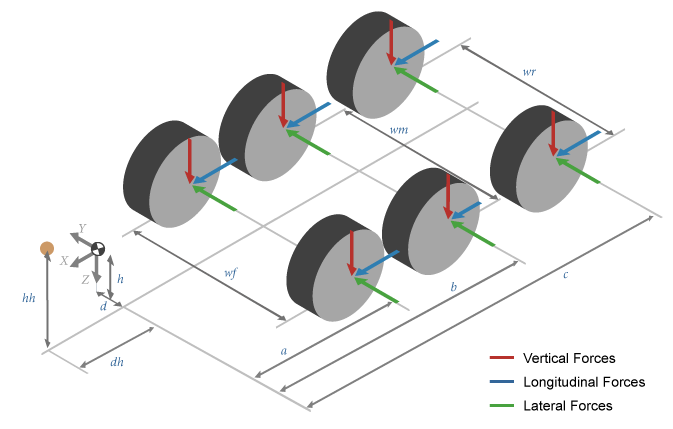
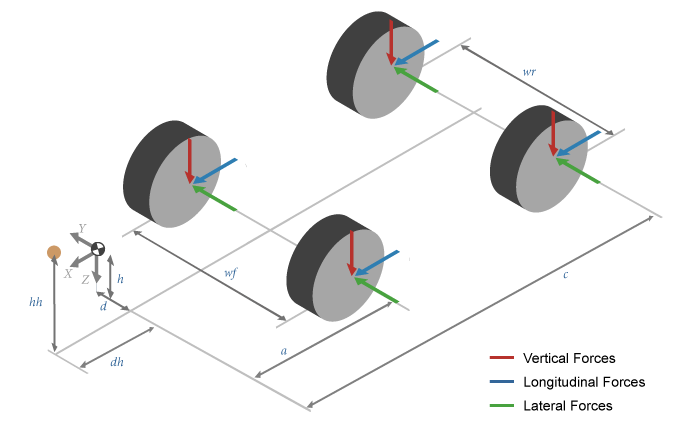
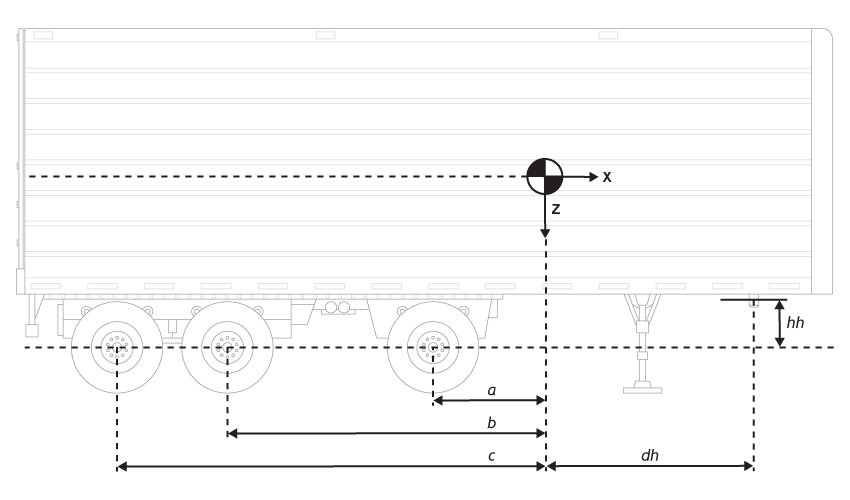
Рисунки используют эти переменные.
| a, B, C | Продольное расстояние передней стороны, середина и задние оси, соответственно, от нормальной точки проекции CG транспортного средства на общую плоскость оси |
| h | Высота CG устройства подачи выше плоскости оси вдоль зафиксированной транспортным средством оси z |
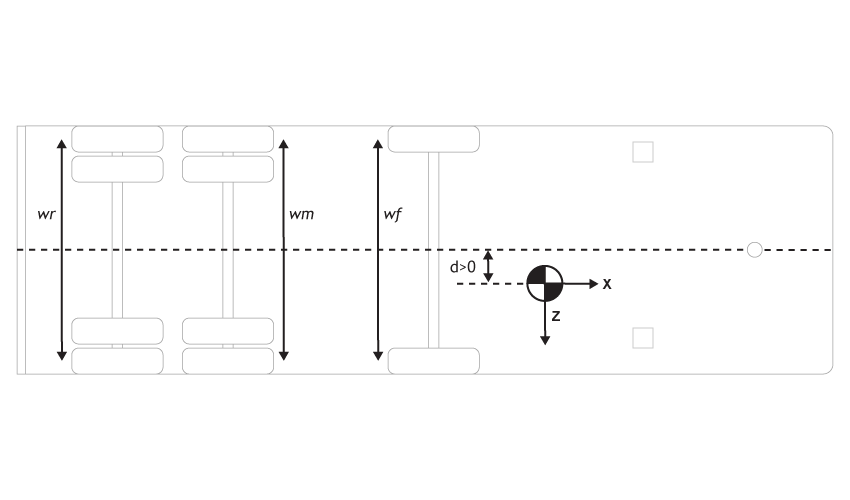
| d | Боковое расстояние от геометрической средней линии до центра массы вдоль зафиксированной транспортным средством оси Y |
| hh | Высота помехи выше плоскости оси вдоль зафиксированной транспортным средством оси z |
| dh | Продольное расстояние помехи от нормальной точки проекции CG устройства подачи на общую плоскость оси |
| hl | Боковое расстояние от центра массы, чтобы цепляться вдоль зафиксированной транспортным средством оси Y. |
| wf, wm, wr | Передняя сторона, середина и задняя ширина дорожки, соответственно |
Эта таблица суммирует реализацию блока для вычисления перетаскивания.
| Вычисление | Описание |
|---|---|
Координатное преобразование | Блок преобразовывает скорости ветра от инерционной системы координат до зафиксированной транспортным средством системы координат. |
Сила сопротивления | Чтобы определить относительную скорость полета, блок вычитает скорость ветра из скорости транспортного средства CG. Используя относительную скорость полета, блок определяет силу сопротивления. |
Перетащите моменты | Используя относительную скорость полета, блок определяет моменты перетаскивания. |
Чтобы включить сопоставленной угловой жесткости и релаксационной длине динамические параметры, установите Axle forces на External longitudinal forces или External longitudinal velocity.
| Установки параметров | Описание | |
|---|---|---|
| Сопоставленная угловая жесткость | Включайте релаксационную динамику длины | |
|
| Блок использует постоянные угловые значения жесткости. Углы промаха включают релаксационную длину динамические настройки. Релаксационная длина аппроксимирует эффективную угловую силу жесткости, которая является функцией перемещения колеса. |
|
| Блок использует интерполяционные таблицы, которые являются функциями угловых данных о жесткости и углов промаха. Углы промаха включают релаксационную длину динамические настройки. Релаксационная длина аппроксимирует эффективную угловую силу жесткости, которая является функцией перемещения колеса. |
|
| Блок использует постоянные угловые значения жесткости. |
Vehicle track — Тип дорожки транспортного средстваDual 3-axle (значение по умолчанию) | Single 2-axle | Single 3-axle | Dual 2-axleИспользуйте параметр Vehicle track, чтобы задать количество дорожек.
| Установка дорожки транспортного средства | Реализация |
|---|---|
| Трейлер с одноколейным путем и двумя осями.
|
| Трейлер с двойной дорожкой и двумя осями. Силы действуют в местоположениях твердой точки оси. |
| Трейлер с одноколейным путем и тремя осями.
|
| Трейлер с двойной дорожкой и тремя осями. Силы действуют в местоположениях твердой точки оси. |
Axle forces — Тип силы осиExternal forces (значение по умолчанию) | External longitudinal velocity | External longitudinal forcesИспользуйте параметр Axle forces, чтобы задать тип силы.
| Ось обеспечивает установку | Реализация |
|---|---|
|
|
|
|
|
|
Front wheel steering — WhlAngF входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт WhlAngF.
Middle wheel steering — WhlAngM входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт WhlAngM.
Чтобы включить этот параметр, установите Vehicle track на Single 3-axle или Dual 3-axle.
Rear wheel steering — WhlAngR входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт WhlAngR.
External wind — WindXYZ входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт WindXYZ.
External friction \mu входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт Mu.
Чтобы включить этот параметр, установите Axle forces на одну из этих опций:
External longitudinal forces
External forces
External forces — FExt входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт FExt.
External moments — MExt входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт MExt.
Hitch forces fh входной портon (значение по умолчанию) | offВыберите, чтобы создать входной порт Fh.
Hitch moments — Mh входной портon (значение по умолчанию) | offВыберите, чтобы создать входной порт Mh.
Initial longitudinal position — X_o входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт X_o.
Initial yaw angle — psi_o входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт psi_o.
Initial longitudinal velocity — xdot_o входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт xdot_o.
Чтобы включить этот параметр, установите Axle forces на External longitudinal forces или External forces.
Initial yaw rate — r_o входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт r_o.
Initial lateral position — Y_o входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт Y_o.
Air temperature — AirTemp входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт AirTemp.
Initial lateral velocity — ydot_o входной портoff (значение по умолчанию) | onВыберите, чтобы создать входной порт ydot_o.
Number of wheels on front axle, NF — Переднее количество колесаscalarКоличество колес на передней оси, NF. Значение является безразмерным.
Number of wheels on middle axle, NM — Среднее количество колесаscalarКоличество колес на средней оси, NM. Значение является безразмерным.
Чтобы включить этот параметр, установите Vehicle track на Single 3-axle или Dual 3-axle.
Number of wheels on rear axle, NR — Заднее количество колесаscalarКоличество колес на задней оси, NR. Значение является безразмерным.
Vehicle mass, m — Масса транспортного средстваscalarМасса транспортного средства, m, в kg.
Longitudinal distance from center of mass to front axle, a — Расстояние от CM до передней осиscalarРасстояние от CM транспортного средства до передней оси, a, в m.
Longitudinal distance from center of mass to middle axle, b — Расстояние от CM до средней осиscalarРасстояние от CM транспортного средства до средней оси, b, в m.
Чтобы включить этот параметр, установите Vehicle track на Single 3-axle или Dual 3-axle.
Longitudinal distance from center of mass to rear axle, c — Расстояние от CM до задней осиscalarРасстояние от CM транспортного средства до передней оси, c, в m.
Vertical distance from center of mass to axle plane, h — Расстояние от CM до плоскости осиscalarВертикальное расстояние от CM транспортного средства до плоскости оси, h, в m.
Vertical distance from hitch to axle plane, hh — Расстояние от помехи до плоскости осиscalarВертикальное расстояние от помехи до плоскости оси, hh, в m.
Чтобы включить этот параметр, на панели Input signals, выбирают Hitch forces или Hitch moments.
Longitudinal distance from center of mass to hitch, dh — Расстояние до помехиscalarПродольное расстояние от центра массы к помехе, dh, в m.
Чтобы включить этот параметр, на панели Input signals, выбирают Hitch forces или Hitch moments.
Initial inertial frame longitudinal position, X_o — Начальная буква, инерционная X местоположенийscalarНачальное смещение CG транспортного средства вдоль зафиксированной землей Оси X, в m.
Initial longitudinal velocity, xdot_o — Начальная скоростьscalarНачальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси X, в m/s.
Чтобы включить этот параметр, установите Axle forces на одну из этих опций:
External longitudinal forces
External forces
Mapped corner stiffness — Выборoff (значение по умолчанию) | onВключает сопоставленное угловое вычисление жесткости.
Чтобы включить этот параметр, установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Include relaxation length dynamics — Включите релаксационную динамику длиныon (значение по умолчанию) | offВключает релаксационную динамику длины.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Lateral distance from geometric centerline to center of mass, d — Расстояние от средней линии до CMscalarБоковое расстояние от геометрической средней линии до центра массы, d, в m, вдоль зафиксированного транспортным средством y. Положительные значения указывают, что CM трейлера справа от геометрической средней линии. Отрицательные величины указывают, что CM трейлера слева от геометрической средней линии.
Front track width, w_f — Передняя ширина дорожкиscalarПередняя ширина дорожки, wf, в m.
Чтобы включить этот параметр, установите Vehicle track на Dual 2-axle или Dual 3-axle.
Middle track width, w_m — Средняя ширина дорожкиscalarСредняя ширина дорожки, wm, в m.
Чтобы включить этот параметр, установите Vehicle track на Dual 3-axle.
Rear track width, w_r — Задняя ширина дорожкиscalarЗадняя ширина дорожки, wr, в m.
Чтобы включить этот параметр, установите Vehicle track на Dual 2-axle или Dual 3-axle.
Front axle tire corner stiffness, Cy_f — Передняя жесткость шины осиscalarПередняя угловая жесткость шины, Cyf, в N/rad.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Middle axle tire corner stiffness, Cy_m — Средняя жесткость шины осиscalarСредняя угловая жесткость шины, Cym, в N/rad.
Включить этот параметр:
Установите Vehicle track на одну из этих опций:
Single 3-axle
Dual 3-axle
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Rear axle tire corner stiffness, Cy_r — Жесткость шины задней осиscalarУгловая жесткость задней шины, Cyr, в N/rad.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Front tire(s) relaxation length, sigma_f — Релаксационная длинаscalarПередняя продолжительность релаксации шины, σf, в m.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Сделайте любой из них:
Выберите Mapped corner stiffness.
Очистите Mapped corner stiffness и выберите Include relaxation length dynamics.
Middle tire(s) relaxation length, sigma_m — Релаксационная длинаscalarСредняя продолжительность релаксации шины, σm, в m.
Включить этот параметр:
Установите Vehicle track на одну из этих опций:
Single 3-axle
Dual 3-axle
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Сделайте любой из них:
Выберите Mapped corner stiffness.
Очистите Mapped corner stiffness и выберите Include relaxation length dynamics.
Rear tire(s) relaxation length, sigma_r — Релаксационная длинаscalarПродолжительность релаксации задней шины, σr, в m.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Сделайте любой из них:
Выберите Mapped corner stiffness.
Очистите Mapped corner stiffness и выберите Include relaxation length dynamics.
Front axle slip angle breakpoints, alpha_f_brk — Точки остановаvectorПередние угловые точки останова промаха оси, αfbrk, в рад.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Front axle corner data, Cy_f_data — Точки останова[-9e3 9e3] (значение по умолчанию) | vectorПередние угловые данные об оси, Cyfdata, в N/rad.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Middle axle slip angle breakpoints, alpha_m_brk — Точки остановаvectorСредние угловые точки останова промаха оси, αmbrk, в рад.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Middle axle corner data, Cy_m_data — Точки останова[-9e3 9e3] (значение по умолчанию) | vectorСредние угловые данные об оси, Cymdata, в N/rad.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle slip angle breakpoints, alpha_r_brk — Точки остановаvectorУгловые точки останова промаха задней оси, αrbrk, в рад.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle corner data, Cy_r_data данные[-9e3 9e3] (значение по умолчанию) | vectorУгловые данные о задней оси, Cyrdata, в N/rad.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Initial inertial frame lateral displacement, Y_o — ПоложениеscalarНачальное смещение CG транспортного средства вдоль зафиксированной землей Оси Y, в m.
Initial lateral velocity, ydot_o — СкоростьscalarНачальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси Y, в m/s.
Yaw polar inertia, Izz — ИнерцияscalarОтклонение от курса полярная инерция, в kg*m^2.
Initial yaw angle, psi_o — Вращение PsiscalarВращение зафиксированной транспортным средством системы координат о зафиксированной землей оси Z (отклонение от курса), в рад.
Initial yaw rate, r_o — Уровень отклонения от курсаscalarСкорость вращения транспортного средства о зафиксированной транспортным средством оси z (уровень отклонения от курса), в rad/s.
Longitudinal drag area, Af — Эффективная площадь поперечного сечения транспортного средстваscalarЭффективная площадь поперечного сечения транспортного средства, Af, чтобы вычислить аэродинамическую силу сопротивления на транспортное средство, в m2.
Longitudinal drag coefficient, Cd — Коэффициент аэродинамического сопротивленияscalarКоэффициент аэродинамического сопротивления, Cd. Значение является безразмерным.
Longitudinal lift coefficient, Cl — Воздушный коэффициент лифтаscalarВоздушный коэффициент лифта, Cl. Значение является безразмерным.
Longitudinal drag pitch moment, Cpm — Сделайте подачу перетаскиваютscalarПродольный коэффициент момента подачи перетаскивания, Cpm. Значение является безразмерным.
Relative wind angle vector, beta_w — Угол ветраvectorОтносительный угловой вектор ветра, βw, в рад.
Side force coefficient vector, Cs — Коэффициент силы стороны vectorКоэффициент вектора коэффициентов силы стороны, Cs. Значение является безразмерным.
Yaw moment coefficient vector, Cym — Момент отклонения от курса перетаскиваетvectorКоэффициент вектора коэффициентов момента отклонения от курса, Cym. Значение является безразмерным.
Absolute air pressure, Pabs — ДавлениеscalarЭкологическое абсолютное давление, Pabs, в Па.
Air temperature, Tair — ТемператураscalarЭкологическая абсолютная температура, T, в K.
Чтобы включить этот параметр, очистите Air temperature.
Gravitational acceleration, g — Сила тяжестиscalarГравитационное ускорение, g, в м/с^2.
Nominal friction scaling factor, mu — Масштабный коэффициент тренияscalarНоминальный масштабный коэффициент трения, μ. Значение является безразмерным.
Включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите External Friction.
Longitudinal velocity tolerance, xdot_tol ДопускscalarПродольный скоростной допуск, в m/s.
Nominal normal force, Fznom — Нормальная силаscalarНоминальная нормальная сила, в N.
Чтобы включить этот параметр, установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Geometric longitudinal offset from axle plane, longOff — Продольное смещениеscalarСмещение шасси транспортного средства от плоскости оси вдоль зафиксированной транспортным средством оси X, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси независимо от CG транспортного средства.
Geometric lateral offset from center plane, latOff — Боковое смещениеscalarСмещение шасси транспортного средства от центральной плоскости вдоль зафиксированной транспортным средством оси Y, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси независимо от CG транспортного средства.
Geometric vertical offset from axle plane, vertOff — Вертикальное смещениеscalarСмещение шасси транспортного средства от плоскости оси вдоль зафиксированной транспортным средством оси z, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси независимо от CG транспортного средства.
Wrap Euler angles, wrapAng — Перенесите Углы Эйлера к интервалу [-pi, pi]off (значение по умолчанию) | onПеренесите Углы Эйлера к интервалу [-pi, pi]. Для маневров транспортного средства, которые могут подвергнуться вращениям отклонения от курса транспортного средства, которые находятся вне этого интервала, рассмотрите очистку параметра, если вы хотите:
Отследите общее вращение отклонения от курса транспортного средства.
Избегайте разрывов в средствах оценки состояния транспортного средства.
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения (SAE), 1992.
Trailer Body 6DOF | Vehicle Body 3DOF | Vehicle Body 3DOF Three Axles


