

Вычислите карту несоизмеримости посредством полуглобального соответствия
disparityMap = disparitySGM(I1,I2)I1 и I2, при помощи метода полуглобального соответствия (SGM). Чтобы знать больше об исправлении стереоизображений, смотрите Исправление Изображений.
disparityMap = disparitySGM(I1,I2,Name,Value)
Загрузите исправленное изображение стереопары.
I1 = imread('rectified_left.png'); I2 = imread('rectified_right.png');
Создайте анаглиф стерео исправленного изображения стереопары и отобразите его. Можно просмотреть изображение в 3-D при помощи красно-голубых стекол стерео.
A = stereoAnaglyph(I1,I2);
figure
imshow(A)
title('Red-Cyan composite view of the rectified stereo pair image')
Преобразуйте исправленные входные цветные изображения в полутоновые изображения.
J1 = rgb2gray(I1); J2 = rgb2gray(I2);
Вычислите карту несоизмеримости посредством полуглобального соответствия. Укажите диапазон несоизмеримости как [0, 48], и минимальное значение уникальности как 20.
disparityRange = [0 48]; disparityMap = disparitySGM(J1,J2,'DisparityRange',disparityRange,'UniquenessThreshold',20);
Отобразите карту несоизмеримости. Установите область значений отображения на то же значение как область значений несоизмеримости.
figure imshow(disparityMap,disparityRange) title('Disparity Map') colormap jet colorbar

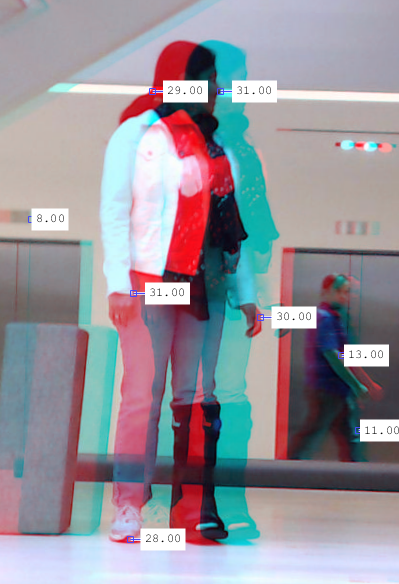
Область значений несоизмеримости должна быть выбрана, чтобы покрыть минимум и максимальную сумму горизонтального сдвига между соответствующими пикселями в исправленном изображении стереопары. Можно определить аппроксимированные горизонтальные значения сдвига из анаглифа стерео изображения стереопары. Вычислите анаглиф стерео исправленных изображений при помощи stereoAnaglyph функция. Отобразите анаглиф стерео в Image Viewer при помощи imtool функция. Чтобы измерить сумму горизонтального сдвига между соответствующими точками в изображении стереопары, выберите Measure Distance из меню Tools в Image Viewer. Выберите минимальные и максимальные значения несоизмеримости для области значений несоизмеримости на основе этого измерения.
Например, этот рисунок отображает анаглиф стерео исправленного изображения стереопары и горизонтальных значений сдвига, измеренных между соответствующими точками в изображении стереопары. Минимальные и максимальные значения сдвига вычисляются как 8 и 31 соответственно. На основе этих значений область значений несоизмеримости может быть выбрана в качестве [0, 48].
[1] Hirschmuller, H. "Точная и Эффективная Обработка Стерео Полуглобальной переменной, Соответствующей и Взаимной информацией". В Продолжениях Конференции по IEEE по Компьютерному зрению и Распознаванию образов (CVPR), стр 807-814. Сан-Диего, CA: IEEE, 2005.