Находит углы с помощью алгоритма Харриса или FAST
visionhdl.CornerDetector Система object™ обнаруживает углы при помощи алгоритма от ускоренного теста сегмента (FAST) функций или пересекающимися ребрами (Харрис) алгоритм. Для каждого пикселя, если пиксель является углом, объект возвращает угловую метрику. Если пиксель не является углом, объект возвращает пиксельное значение нуля.
Алгоритм FAST тестирует круговую область вокруг потенциального центра угла. Тест обнаруживает угол, если непрерывный раздел пикселей является или более ярким, чем центр плюс порог или более темным, чем центр минус порог. Можно задать минимальный контрастный порог как свойство или аргумент и выбор из трех правил задать угол. Эти правила задают, сколько пикселей в кругу пикселей должно превысить минимальный контраст для центрального пикселя, который будет рассмотрен углом. Объект выполняет параллельные тесты всех комбинаций непрерывных пикселей вокруг круга. Алгоритм FAST использует немного аппаратных ресурсов.
Алгоритм Харриса вычисляет горизонтальные и вертикальные градиенты, фильтрует компоненты градиента с круговым Гауссовым фильтром 5 на 5 и вычисляет метрику, которая представляет силу угла. Можно задать порог, который определяет уровень, на котором обнаруживаются углы. Объект возвращает угол для пикселей, где метрика превышает этот порог. Алгоритм Харриса использует больше аппаратных ресурсов, чем Алгоритм FAST, но может обнаружить углы, которые не может найти Алгоритм FAST.
Обнаружить углы в пиксельном потоке:
Создайте visionhdl.CornerDetector объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?.
corners = visionhdl.CornerDetector( возвращает угловой Системный объект детектора. Установите свойства с помощью одной или нескольких пар "имя-значение". Заключите каждое имя свойства в одинарные кавычки. Name,Value)
Например:
corners = visionhdl.CornerDetector('Method','FAST 7 of 12',... 'MinContrastSource','Input port',... 'PaddingMethod','None')
Если в противном случае не обозначено, свойства являются ненастраиваемыми, что означает, что вы не можете изменить их значения после вызова объекта. Объекты блокируют, когда вы вызываете их, и release функция разблокировала их.
Если свойство является настраиваемым, можно изменить его значение в любое время.
Для получения дополнительной информации об изменении значений свойств смотрите Разработку системы в MATLAB Используя Системные объекты.
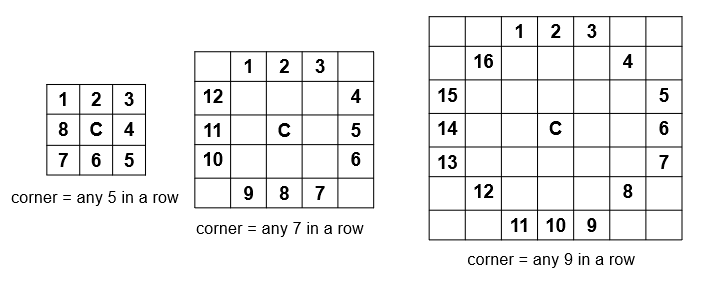
Method — Метод обнаружения'FAST 5 of 8' (значение по умолчанию) | 'FAST 7 of 12' | 'FAST 9 of 16' | 'Harris'Выберите алгоритм Харриса или размер круга для Алгоритма FAST. Три опции FAST задают, сколько непрерывных пикселей на круге должно превысить порог для центрального пикселя, который будет отмечен как угол. Для кругов 8, 12, и 16 пикселей, показанных на этих рисунках, объект обнаруживает угол, когда 5, 7, или 9 непрерывных пикселей, соответственно, выше порога. Объект проверяет на это количество непрерывных пикселей где угодно на круге. Объект использует ядро размера, 3х3 для 'FAST 5 of 8', 5 на 5 для 'FAST 7 of 12', и 7 7 для 'FAST 9 of 16'.
MinContrastSource — Источник для порога, который указывает на угол для Алгоритма FAST'Property' (значение по умолчанию) | 'Input port'Задайте 'Property' устанавливать контрастный порог при помощи MinContrast свойство. Задайте 'Input port' включить thresh входной параметр.
Чтобы включить это свойство, установите Method свойство к одной из опций FAST.
MinContrast — Порог, который указывает на угол для Алгоритма FASTКаждый пиксель в кругу вычтен из центрального пиксельного значения, и только те различия, которые превышают этот порог, используются, чтобы определить, является ли центральный пиксель углом и вычислить выходную метрику. Это значение снято к совпадающему типу данных как pixelIn.
Чтобы включить это свойство, установите Method свойство к одной из опций FAST и набора MinContrastSource свойство к 'Property'.
ThresholdSource — Источник для порога, который указывает на угол для алгоритма Харриса'Property' (значение по умолчанию) | 'Input port'Задайте 'Property' устанавливать порог при помощи Threshold свойство. Задайте 'Input port' включить thresh входной параметр.
Чтобы включить это свойство, установите Method свойство к 'Harris'.
'Порог' — Порог, который указывает на угол для алгоритма ХаррисаЭто значение представляет приближение собственных значений матрицы Харриса, вычисленной от результатов градиента. Объект возвращает угол для пикселей, где метрика превышает этот порог. Это значение снято к совпадающему типу данных как выход corner. Угловая метрика находится в области значений четвертой степени значений входного пикселя. Например, для 8-битного входного пикселя, выходной размер полной точности составляет 44 бита.
Чтобы включить это свойство, установите Method свойство к 'Harris' и набор ThresholdSource свойство к 'Property'.
LineBufferSize — Размер буфера линииЗадайте степень двойки, которая вмещает количество активных пикселей в одной горизонтальной линии.
Если вы задаете значение, которое не является степенью двойки, объект использует следующую самую большую степень двойки. Объект выделяет (N – 1)-by-LineBufferSize ячейки памяти, чтобы сохранить пиксели. N является размером ядра.
Объект использует ядро размера, 3х3 когда Method свойством является 'FAST 5 of 8', 5 на 5, когда Method 'FAST 7 of 12', и 7 7 когда Method 'FAST 9 of 16'.
Когда вы устанавливаете Method к 'Harris', объект использует тот 1 3 ядро и одно ядро 3 на 1 для вычисления градиента и три ядра 5 на 5 для кругового фильтра окна на трех компонентах градиента.
PaddingMethod — Метод для дополнения'Symmetric' (значение по умолчанию) | 'Replicate' | 'None'Выберите один из этих методов для дополнения контура входного изображения. Для получения дополнительной информации об этих методах, смотрите, что Ребро Дополняет.
'Symmetric' — Установите значение дополнительных пикселей, чтобы зеркально отразить ребро изображения. Эта опция препятствует тому, чтобы углы были обнаружены на контурах активной системы координат.
'Replicate' — Повторите значение пикселей в ребре изображения.
'None' — Исключите дополнительную логику. Объект не устанавливает пиксели вне фрейма изображения ни к какому конкретному значению. Эта опция уменьшает аппаратные ресурсы, используемые объектом и очищением, требуемым между системами координат, но влияет на точность выходных пикселей в ребрах системы координат. Чтобы обеспечить пиксельную потоковую синхронизацию, выходная система координат одного размера с входным кадром. Однако избегать использования пикселей, вычисленных от неопределенных дополнительных значений, маски от KernelSize/2 пиксели вокруг ребра системы координат для нисходящих операций. Для получения дополнительной информации смотрите Пропускную способность Увеличения с Дополнением Ни одного.
Круговые фильтры окна, используемые в алгоритме Харриса, заполняют ребра системы координат с помощью 'Replicate' дополнение.
RoundingMethod — Режим Rounding используется для операций фиксированной точки'Floor' (значение по умолчанию) | 'Ceiling' | 'Convergent' | 'Nearest' | 'Round' | 'Zero'Режим Rounding используется для операций фиксированной точки. Когда вход является любым целым числом или типом данных с фиксированной точкой, алгоритм использует вычисления с фиксированной точкой для внутренних вычислений. Эта опция не применяется, когда типом входных данных является single или double.
OverflowAction — Режим переполнения используется для операций фиксированной точки'Saturate' (значение по умолчанию) | 'Wrap'Режим переполнения используется для операций фиксированной точки. Когда вход является любым целым числом или типом данных с фиксированной точкой, алгоритм использует вычисления с фиксированной точкой для внутренних вычислений. Эта опция не применяется, когда типом входных данных является single или double.
OutputDataType — Метод, чтобы определить тип данных выходной угловой метрики'Same as first input' (значение по умолчанию) | 'Custom' | 'Full precision'Метод, чтобы определить тип данных выходной угловой метрики.
'Same as first input''— Наборы тип данных угловой метрики, чтобы совпадать с типом данных pixelIn.
'Custom' — Устанавливает тип данных угловой метрики совпадать с типом данных, заданным в CustomOutputDataType свойство.
'Full precision''— Вычисляет типы внутренних и выходных данных, использующие правила полной точности. Эти правила обеспечивают точные численные данные фиксированной точки и предотвращают квантование в объекте. Биты добавляются, по мере необходимости, чтобы предотвратить округление и переполнение.
CustomOutputDataType — Тип данных для выходной угловой метрикиnumerictype(0,8,0) (значение по умолчанию) | numerictype(signed,WL,FL)Тип данных для выходной угловой метрики в виде numerictype(signed,WL,FL), где WL является размером слова, и FL является дробной длиной в битах. Объектные случаи угловая метрика к этому типу данных.
Это свойство применяется, когда вы устанавливаете OutputDataType к 'Custom'.
[ задает порог, который определяет угол как входной параметр. Этот синтаксис запрашивает и Харриса и Алгоритмы FAST. Порог интерпретирован по-другому для каждого алгоритма. Чтобы включить этот аргумент при использовании Алгоритма FAST, установите corner,ctrlOut] = corners(pixelIn,thresh,ctrlIn)MinContrastSource свойство к 'Input port'. Чтобы включить этот аргумент при использовании алгоритма Харриса, установите ThresholdSource свойство к 'Input port'.
Этот объект использует пиксельный интерфейс потоковой передачи со структурой для сигналов управления кадром. Этот интерфейс включает объекту действовать независимо от размера изображения и формата, и соединиться с другими объектами Vision HDL Toolbox™. Объект принимает и возвращает скалярное пиксельное значение и управляющие сигналы как структура, содержащая пять сигналов. Управляющие сигналы указывают на валидность каждого пикселя и его местоположения в системе координат. Чтобы преобразовать пиксельную матрицу в пиксельный поток и управляющие сигналы, используйте visionhdl.FrameToPixels объект. Для полного описания интерфейса смотрите Пиксельный Интерфейс Потоковой передачи.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Этот объект реализует алгоритмы, описанные на странице с описанием блока Corner Detector.
