Стандарт или заданный продольный цикл диска
Powertrain Blockset / Разработчик Сценария Транспортного средства
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Цикл Диска и Маневры
Блок Drive Cycle Source генерирует стандарт или заданный пользователями продольный цикл диска. Блок выход является заданным транспортным средством продольная скорость, для которой можно использовать:
Предскажите крутящий момент механизма и расход топлива, которого транспортное средство требует, чтобы достигнуть желаемой скорости и ускорения для данной ссылки переключения передач.
Произведите реалистическую скорость и переключите ссылки для ускорения замкнутого цикла и тормозящие команды для управления транспортным средством и моделей объекта управления.
Изучите, настройте и оптимизируйте управление транспортным средством, производительность системы и системную робастность по нескольким циклам диска.
Идентифицируйте отказы в допусках, заданных стандартизированными тестами, включая:
Динамометр EPA, управляющий schedules1
Во всем мире Согласованная Процедура тестирования Легкового автомобиля (WLTP) лаборатория tests2
Для циклов диска можно использовать:
Управляйте циклами из предопределенных источников. По умолчанию блок включает FTP–75 управляйте циклом. Чтобы установить дополнительные циклы диска от пакета поддержки, смотрите Данные о Цикле Диска Установки. Пакет поддержки имеет циклы диска, которые включают расписания переключения передач, например, JC08 и CUEDC.
Переменные рабочей области, которые задают ваши собственные циклы диска.
.mat. xls. xlsx, или.txt файлы.
Параметры широко открытого дросселя (WOT), включая начальную и номинальную задающую скорость, время начала замедления и итоговая задающая скорость.
Чтобы достигнуть перечисленных в таблице целей, используйте заданные опции параметров блоков Drive Cycle Source.
| Цель | Действие |
|---|---|
Повторите цикл диска, если время выполнения симуляции превышает длину цикла диска. | Выберите Repeat cyclically. |
Выведите ускорение, как вычислено дифференцированием Savitzky-Golay. | Выберите Output acceleration. |
Задайте период расчета для дискретных приложений. | Задайте параметр Output sample period (0 for continuous), dt. |
Обновите время выполнения симуляции так, чтобы оно равнялось длине цикла диска. | Нажмите Update simulation time. Если ссылка настройки модели существует, блок не включает эту опцию. |
Постройте цикл диска на рисунке MATLAB®. | Нажмите Plot drive cycle. |
Задайте цикл диска с помощью переменной рабочей области. | Нажмите Specify variable. Блок:
Задайте переменную рабочей области так, чтобы она содержала время, скорость, и, опционально, расписание переключения передач. Для примеров смотрите, Создают Циклы Диска Используя Переменные Рабочей области. |
Задайте цикл диска с помощью файла. | Нажмите Select file. Блок:
Задайте файл, который содержит время, скорость, и, опционально, расписание переключения передач. |
Выведите механизм цикла диска. |
Задайте цикл диска, который содержит расписание переключения передач. Можно использовать:
Нажмите Output gear shift data. |
Установите дополнительные циклы диска от пакета поддержки. | Нажмите Install additional drive cycles. Блок включает параметр, если можно установить дополнительные циклы диска от пакета поддержки. |
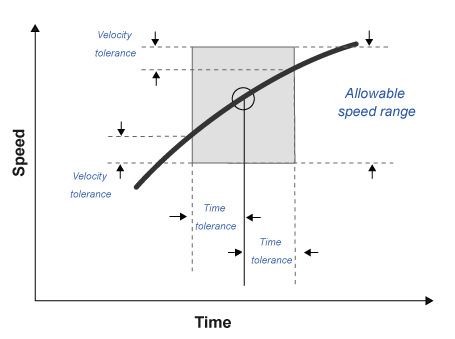
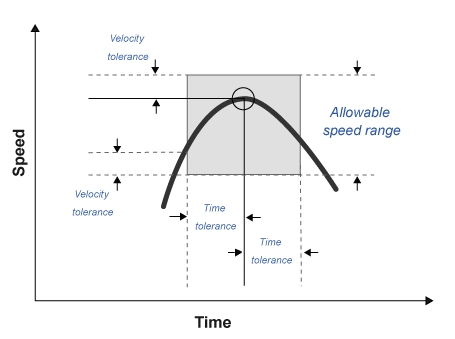
Идентифицируйте отказы цикла диска в допусках, заданных стандартизированными тестами. | На вкладке Fault Tracking используйте параметры, чтобы задать отказоустойчивость. Если скорость транспортного средства не в допустимой области значений скорости, блок устанавливает условие отказа. |
На вкладке Fault Tracking используйте параметры, чтобы задать отказоустойчивость. Если скорость транспортного средства или время не в допустимой области значений, блок устанавливает условие отказа.
| Параметр | Описание | Установка | |
|---|---|---|---|
EPA Standard1 | WLTP Tests2 | ||
Speed tolerance | Допуск скорости выше самой высокой точки и ниже самой низкой точки скорости цикла диска прослеживает в допуске времени. | 2,0 мили в час | 2,0 км/ч |
Time tolerance | Время, когда использование блока, чтобы определить допуск скорости. | 1,0 с | 1,0 с |
| Maximum number of faults | Максимальное количество отказов во время цикла диска. | Не заданный | 10 |
| Maximum single fault time | Максимальная длительность отказа. | 2,0 с | 1,0 с |
| Maximum total fault time | Максимальное накопленное время проведено при условии отказа. | Не заданный | Не заданный |
Эти фигуры иллюстрируют, как блок использует скорость и допуски времени, чтобы определить допустимую область значений скорости.
|
|
|
Если вы устанавливаете Drive cycle source на Workspace variable, можно задать переменную рабочей области, которая задает цикл диска.
Эта таблица обеспечивает примеры для использования переменных рабочей области, чтобы создать ваши собственные циклы диска.
| Переменная рабочей области | Исходная скоростная единица | Выведите скоростную единицу | Управляйте графиком цикла |
|---|---|---|---|
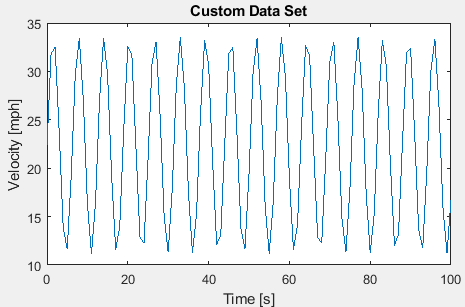
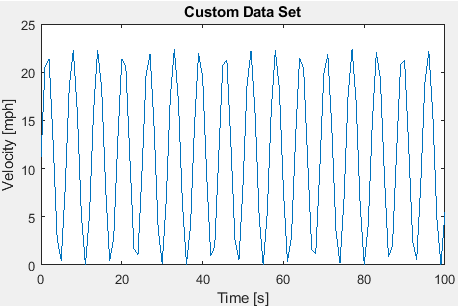
Структура без расписания переключения передач. набор From workspace к t = 0:1:100; xdot = 5.*sin(t)+10; myCycleS.time = t'; myCycleS.signals.values = xdot'; | m/s | mph |
|
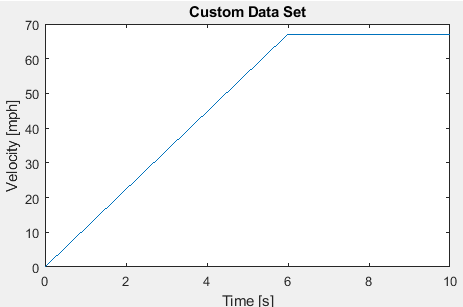
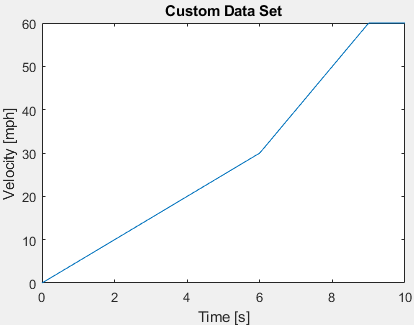
Структура с расписанием переключения передач. набор From workspace к gears=[0, 1, 2, 3, 3, 4, 4, 4, 4, 4, 4]; t=0:1:10; xdot=[0,5,10,15,20,25,30,30,30,30,30]; myCycleS.time=t'; myCycleS.signals.values=[xdot',gears']; | m/s | mph |
|
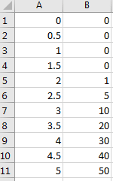
2D массив без расписания переключения передач. набор From workspace к t = 0:1:100; xdot = 5.*sin(t)+5; myCycleA = [t',xdot']; | m/s | mph |
|
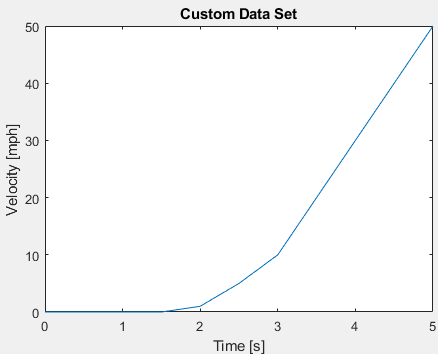
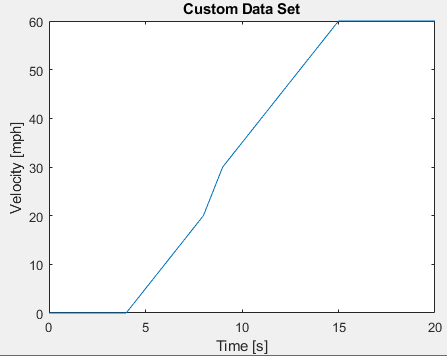
2D массив с расписанием переключения передач. набор From workspace к gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,5,10,15,20,25,30,40,50,60,60]; myCycleA=[t',xdot',gears']; | mph | mph |
|
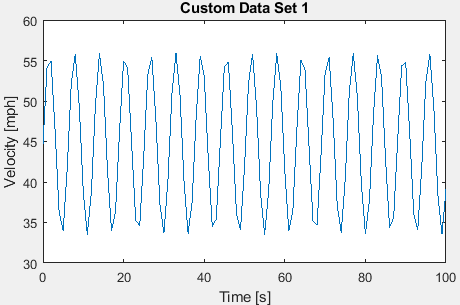
Временные ряды возражают без расписания переключения передач. набор From workspace к myCycleT = timeseries; t = 0:1:100; xdot = 5.*sin(t)+20; myCycleT.Data = xdot'; myCycleT.Time = t; | m/s | mph |
|
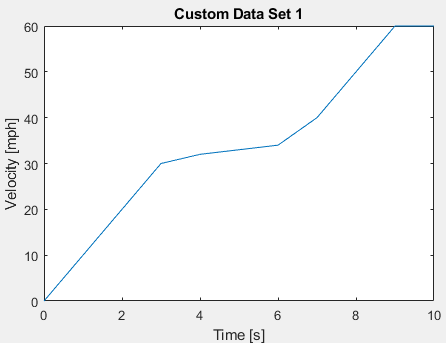
Временные ряды возражают без расписания переключения передач. набор From workspace к myCycleT = timeseries; gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,10,20,30,32,33,34,40,50,60,60]; myCycleT.Data = [xdot',gears']; myCycleT.Time = t'; | mph | mph |
|
Drive cycle source — Выберите источник цикла дискаFTP75 (значение по умолчанию) | Wide Open Throttle (WOT) | Workspace variable | .mat, .xls, .xlsx or .txt fileFTP75 — Загрузите цикл диска FTP75 от.mat файл в 1D блок Lookup Table. FTP75 представляет городской цикл диска, который можно использовать, чтобы определить эмиссию выхлопной трубы и экономию топлива легковых автомобилей. Чтобы установить дополнительные циклы диска от пакета поддержки, смотрите Данные о Цикле Диска Установки.
Wide Open Throttle (WOT) — Используйте параметры WOT, чтобы задать цикл диска для тестирования эффективности.
Workspace variable — Задайте время, скорость, и, опционально, данные о механизме как структура, 2D массив или объект временных рядов.
.mat, .xls, .xlsx or .txt file — Задайте файл, который содержит время, скорость и, опционально, данные о механизме в формате столбца.
Если вы установили дополнительные циклы, можно использовать set_param установить цикл диска. Например, чтобы использовать цикл диска US06:
set_param([gcs '/Drive Cycle Source'],'cycleVar','US06')
Таблица суммирует зависимости от параметра.
| Управляйте источником цикла | Включает параметр |
|---|---|
Wide Open Throttle (WOT) | Start time, t_wot1 |
Initial reference speed, xdot_woto | |
Nominal reference speed, xdot_wot1 | |
Time to start deceleration, wot2 | |
Final reference speed, xdot_wot2 | |
WOT simulation time, t_wotend | |
Source velocity units | |
Workspace variable | From workspace |
Source velocity units | |
Output gear shift data, если цикл диска включает расписание переключения передач | |
| Drive cycle source file |
| Source velocity units | |
Output gear shift data, если цикл диска включает расписание переключения передач |
From workspace Рабочая областьvariableМонотонно увеличивающееся время, скорость, и, опционально, данные о механизме, заданные структурой, 2D массивом или объектом временных рядов. Введите модули для скорости в поле параметра Source velocity units.
Актуальный вопрос должен существовать для каждой соответствующей временной стоимости. Вы не можете задать infпустой, или NaN.
Эта таблица обеспечивает примеры для использования переменных рабочей области, чтобы создать ваши собственные циклы диска.
| Переменная рабочей области | Исходная скоростная единица | Выведите скоростную единицу | Управляйте графиком цикла |
|---|---|---|---|
Структура без расписания переключения передач. набор From workspace к t = 0:1:100; xdot = 5.*sin(t)+10; myCycleS.time = t'; myCycleS.signals.values = xdot'; | m/s | mph |
|
Структура с расписанием переключения передач. набор From workspace к gears=[0, 1, 2, 3, 3, 4, 4, 4, 4, 4, 4]; t=0:1:10; xdot=[0,5,10,15,20,25,30,30,30,30,30]; myCycleS.time=t'; myCycleS.signals.values=[xdot',gears']; | m/s | mph |
|
2D массив без расписания переключения передач. набор From workspace к t = 0:1:100; xdot = 5.*sin(t)+5; myCycleA = [t',xdot']; | m/s | mph |
|
2D массив с расписанием переключения передач. набор From workspace к gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,5,10,15,20,25,30,40,50,60,60]; myCycleA=[t',xdot',gears']; | mph | mph |
|
Временные ряды возражают без расписания переключения передач. набор From workspace к myCycleT = timeseries; t = 0:1:100; xdot = 5.*sin(t)+20; myCycleT.Data = xdot'; myCycleT.Time = t; | m/s | mph |
|
Временные ряды возражают без расписания переключения передач. набор From workspace к myCycleT = timeseries; gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,10,20,30,32,33,34,40,50,60,60]; myCycleT.Data = [xdot',gears']; myCycleT.Time = t'; | mph | mph |
|
Чтобы включить этот параметр, выберите Workspace variable от Drive cycle source.
Drive cycle source file FileName .mat, .xls, .xlsx or .txtФайл, содержащий монотонно увеличивающееся время, скорость, и, опционально, механизм в столбце или разделенном от запятой формате. Блок игнорирует модули в файле. Введите модули для скорости в поле параметра Source velocity units.
| Файл | Исходная скоростная единица | Выведите скоростную единицу | Управляйте графиком цикла |
|---|---|---|---|
.
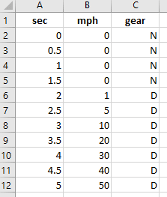
| mph | mph |
|
.
| mph | mph |
|
A.
| mph | mph |
|
Если вы предоставляете расписание механизма с помощью P, R, N, D, L, OD, блок-диаграммы механизмы до целых чисел.
|
Механизм |
Целое число |
|---|---|
|
P |
80 |
|
R |
-1 |
|
N |
0 |
|
L |
1 |
|
D |
2 |
|
OD |
Следующее целое число после самого высокого заданного механизма. |
Например, блок преобразует расписание механизма P P N L D 3 4 5 6 5 4 5 6 7 OD 7 к 80 80 0 1 2 3 4 5 6 5 4 5 6 7 8 7.
Чтобы включить этот параметр, выберите .mat, .xls, .xlsx or .txt file от Drive cycle source.
Repeat cyclically — Повторите цикл дискаoff (значение по умолчанию) | onПовторите цикл диска, если время выполнения симуляции превышает длину цикла диска.
Output acceleration — Выведите ускорениеoff (значение по умолчанию)Чтобы вычислить ускорение, блок реализует дифференцирование Savitzky-Golay с помощью полинома второго порядка с фильтром на три точки выборки.
Чтобы создать выходной ускоряющий порт, выберите Output acceleration. Выбор Output acceleration включает параметр Output acceleration units.
Output gear shift data — Выведите механизмoff (значение по умолчанию) | on
Задайте цикл диска, который содержит расписание переключения передач. Можно использовать:
Пакет поддержки, чтобы установить стандарт управляет циклами, которые включают расписания переключения передач, например, JC08 и CUEDC.
Переменные рабочей области.
.mat. xls. xlsx, или.txt файлы.
Нажатие на этот параметр создает входной порт Gear.
Start time, t_wot1 — Управляйте временем начала циклаscalarУправляйте временем начала цикла в s. Например, этот график показывает цикл диска со временем начала 10 s.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Initial reference speed, xdot_woto — СкоростьscalarНачальная задающая скорость, в модулях, которые вы задаете параметром Source velocity units. Например, этот график показывает цикл диска с начальной задающей скоростью 4 m/s.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Nominal reference speed, xdot_wot1 — СкоростьscalarНоминальная задающая скорость, в модулях, которые вы задаете параметром Source velocity units. Например, этот график показывает цикл диска с номинальной задающей скоростью 30 m/s.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Time to start deceleration, wot2 ВремяscalarВремя, чтобы запустить замедление транспортного средства, в s. Например, этот график показывает цикл диска с замедлением транспортного средства, запускающимся в 25 s.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Final reference speed, xdot_wot2 — СкоростьscalarИтоговая задающая скорость, в модулях, которые вы задаете параметром Source velocity units. Например, этот график показывает цикл диска с итоговой задающей скоростью 2 m/s.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
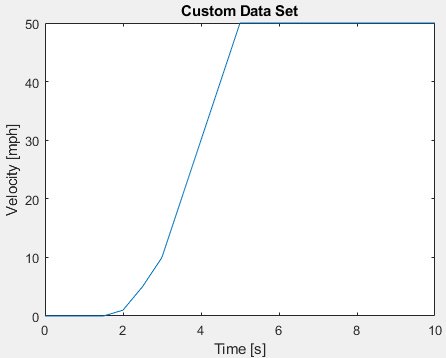
WOT simulation time, t_wotend ВремяscalarЦикл диска время симуляции WOT, в s. Например, этот график показывает цикл диска со временем симуляции 50 s.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Source velocity units — Задайте скоростные единицыm/s (значение по умолчанию)Введите скоростные единицы.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT), Workspace variable, или .mat, .xls, .xlsx or .txt file.
Output velocity units — Задайте скоростные единицыm/s (значение по умолчанию)Выведите скоростные единицы.
Output acceleration units — Задайте ускоряющие модулиm/s^2 (значение по умолчанию)Задайте выходные ускоряющие модули.
Чтобы включить этот параметр, выберите Output acceleration.
Output sample period (0) for continuous — Частота дискретизацииscalarЧастота дискретизации. Установите на 0 в течение периода непрерывной выборки. В течение дискретного периода задайте ненулевой уровень.
Enable fault tracking — Включите отслеживание отказаoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить отслеживание отказа цикла диска. Используйте параметры, чтобы задать отказоустойчивость. Если скорость транспортного средства не в допустимой области значений скорости, блок устанавливает условие отказа.
Выбор этого параметра включает эти параметры:
Speed tolerance, velBnd
Speed tolerance units, velBndUnit
Velocity feedback units, inUnit
Time tolerance, timeBnd
Speed tolerance, velBnd — Управляйте допуском скорости циклаscalarДопуск скорости выше самой высокой точки и ниже самой низкой точки скорости цикла диска прослеживает в допуске времени. Если скорость транспортного средства не в допустимой области значений скорости, блок устанавливает условие отказа. Для допусков, заданных стандартизированными тестами, используйте эти настройки:
Динамометр EPA ведущие расписания — 2.0
Тесты WLTP — 2.0
Эти фигуры иллюстрируют, как блок использует скорость и допуски времени, чтобы определить допустимую область значений скорости.
|
|
|
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Enable fault tracking.
Speed tolerance units, velBndUnit — Установите модулиmph (значение по умолчанию)Модули допуска скорости. Для модулей, заданных стандартизированными тестами, используйте эти модули:
Динамометр EPA ведущие расписания — m/s
Тесты WLTP — km/h
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Enable fault tracking.
Velocity feedback units, inUnit — Установите скоростные модули обратной связиm/s (значение по умолчанию)Скоростные модули обратной связи. Установите значение к VelFdbk модули сигнала входного порта.
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Enable fault tracking.
Time tolerance, timeBnd — Допуск времениscalarВремя, когда использование блока, чтобы определить допуск скорости. Если скорость транспортного средства не в допустимой области значений скорости, блок устанавливает условие отказа. Для допусков времени, заданных стандартизированными тестами, используйте эти настройки:
Динамометр EPA ведущие расписания — 1.0
Тесты WLTP — 1.0
Эти фигуры иллюстрируют, как блок использует скорость и допуски времени, чтобы определить допустимую область значений скорости.
|
|
|
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Enable fault tracking.
Enable failure tracking — Включите отслеживание отказаoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить отслеживание отказа цикла диска.
Чтобы включить этот параметр, выберите Enable fault tracking. Выбор параметра Enable failure tracking включает эти параметры:
Stop simulation when trace fails, stopSim
Maximum number of faults, maxFaultCnt
Maximum single fault time, maxFaultTime
Maximum total fault time, maxTotFaultTime
Maximum number of faults, maxFaultCnt — Максимальное количество отказовscalarМаксимальное количество отказов во время цикла диска. Для номера, заданного стандартизированными тестами, используйте эти настройки:
Динамометр EPA ведущие расписания — Не заданный
Тесты WLTP — 10
Если количество отказов превышает максимальное количество отказов, блок устанавливает отказ отказа.
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Enable failure tracking.
Maximum single fault time, maxFaultTime — Максимальная длительность одиночного отказаscalarМаксимальная длительность одиночного отказа, в s. В течение времени, заданного стандартизированными тестами, используйте эти настройки:
Динамометр EPA ведущие расписания — 2.0
Тесты WLTP — 1.0
Если длительность отказа превышает максимальное время одиночного отказа, блок устанавливает отказ отказа.
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Enable failure tracking.
Maximum total fault time, maxTotFaultTime — Максимальное общее время отказаscalarМаксимальное накопленное время проведено при условии отказа в s.
Если накопленное время, проведенное при условии отказа, превышает максимальное общее время отказа, блок устанавливает отказ отказа.
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Enable failure tracking.
Display simulation trace — Отобразите скоростную трассировкуoff (значение по умолчанию) | onВыберите этот параметр, чтобы отобразить скоростное окно трассировки. Выбор этого параметра может замедлить время симуляции.
Выбор этого параметра включает эти параметры:
Simulation trace update rate, dtTrace
Simulation trace display window, traceWindow
Simulation trace update rate, dtTrace — Проследите частоту обновленияscalarЧастота обновления трассировки симуляции, в s. Установите на 0 в течение периода непрерывной выборки. В течение дискретного периода задайте ненулевой уровень.
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Display simulation trace.
Simulation trace display window, traceWindow — Проследите частоту обновления окнаscalarЧастота обновления окна трассировки симуляции, в s.
Чтобы включить этот параметр, на вкладке Fault Tracking, выбирают Display simulation trace.
[1] Агентство по охране окружающей среды (EPA). EPA городское расписание управления динамометра. 40 CFR 86.115-78, 1 июля 2001.
[2] Комиссия Европейского союза. "Скорость прослеживает допуски". Регулирование Комиссии Европейского союза. 32017R1151, Секунда 1.2.6.6, 1 июня 2017.