Использование движения транспортного средства двигается вперед без усилий, тестируя коэффициенты
Powertrain Blockset / Динамика аппарата
Vehicle Dynamics Blockset / Кузов
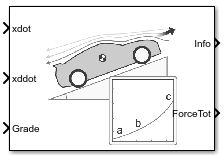
Блок Vehicle Body Total Road Load реализует одну степень свободы (1DOF), твердое использование модели транспортного средства двигается вперед без усилий, тестируя коэффициенты. Можно использовать этот блок в модели транспортного средства, чтобы представлять загрузку, что автомобильная трансмиссия и шасси применяются к передаче или механизму. Это подходит для эффективности уровня системы, калибровки компонента, экономии топлива или исследований отслеживания цикла диска. Блок вычисляет динамическую загрузку трансмиссии с минимальной параметризацией или вычислительной стоимостью.
Можно сконфигурировать блок для кинематического, силы или общей входной мощности.
Кинематический — Блок использует транспортное средство продольная скорость и ускорение, чтобы вычислить тяговую силу и степень.
Сила — Блок использует тяговую силу, чтобы вычислить транспортное средство продольное смещение и скорость.
Степень — Блок использует механизм или степень передачи вычислить транспортное средство продольное смещение и скорость.
Чтобы вычислить общую дорожную загрузку, действующую на транспортное средство, блок реализует это уравнение.
Чтобы определить коэффициенты a, b и c, можно использовать процедуру тестирования, похожую на ту, описанную в Дорожном Измерении Загрузки и Динамометрической Симуляции Используя Методы Coastdown. Можно также использовать Simulink® Design Optimization™, чтобы соответствовать коэффициентам к результатам измерений.
Чтобы вычислить движение транспортного средства, блок использует закон Ньютона для твердых тел.
Общая входная мощность является продуктом общей силы и продольной скорости. Степень из-за дороги и гравитационных сил является продуктом дорожной силы и продольной скорости.
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Внешне степень приложенной силы | PFxExt | |
|
| PwrFxDrag | Степень силы сопротивления | PD | ||
|
| wrStoredGrvty | Изменение уровня в гравитационной потенциальной энергии | Pg | ||
PwrStoredxdot | Уровень в изменении продольной кинетической энергии | Pxdot | |||
Уравнения используют эти переменные.
| a | Установившийся коэффициент сопротивления качению |
| b | Вязкая автомобильная трансмиссия и коэффициент сопротивления качению |
| c | Аэродинамический коэффициент сопротивления |
| g | Гравитационное ускорение |
| x | Транспортное средство продольное смещение относительно земли, в зафиксированной транспортным средством системе координат |
Транспортное средство продольная скорость относительно земли, в зафиксированной транспортным средством системе координат | |
Транспортное средство продольное ускорение относительно земли, зафиксированной транспортным средством системы координат | |
| m | Масса кузова |
| Θ | Дорожный угол класса |
| Ftotal | Общая сила, действующая на транспортное средство |
| Froad | Резистивная дорожная загрузка из-за потерь и гравитационной загрузки |
| Ptotal | Общая тяговая входная мощность |
| Proad | Общая степень из-за потерь и гравитационной загрузки |
Транспортное средство вертикальная скорость вдоль зафиксированного транспортным средством |
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения (SAE), 1992.
[2] Эффективность транспортного средства легкого режима и комитет по мере экономики. Дорожное измерение загрузки и динамометрическая симуляция Используя методы Coastdown. Стандартный J1263_201003. SAE International, март 2010.
Drive Cycle Source | Vehicle Body 1DOF Longitudinal | Vehicle Body 3DOF Longitudinal
