После того, как вы создадите модель архитектуры AUTOSAR, вы начинаете создавать верхний уровень разработки ПО AUTOSAR. Используйте редактор состава, и Simulink® Toolstrip Modeling переходят, чтобы добавить и соединить составы AUTOSAR и компоненты.
На предыдущем шаге вы открыли локальную рабочую папку в качестве примера и создали пустую модель архитектуры AUTOSAR. При необходимости повторите шаг, чтобы открыть рабочую папку и создать пустую модель.
![]()
Когда вы создаете приложение управления положения дросселя, можно обратиться к модели autosar_tpc_composition в качестве примера, который показывает конечный результат.
Как правило, состав AUTOSAR содержит набор компонентов AUTOSAR и составов с разделяемой целью. Как часть построения приложения управления положения дросселя, этот пример помещает четыре компонента датчика в состав датчиков.
Добавить состав датчиков и его компоненты к модели архитектуры AUTOSAR:
В холсте модели архитектуры добавьте блок Software Composition и назовите его Датчиками. Например, на вкладке Modeling, выберите Software Composition и вставьте блок Software Composition в холст. В подсвеченном поле имени введите Sensors.
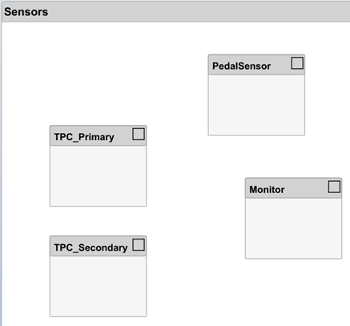
Чтобы заполнить состав, вы открываете блок Software Composition и добавляете блоки Software Component.
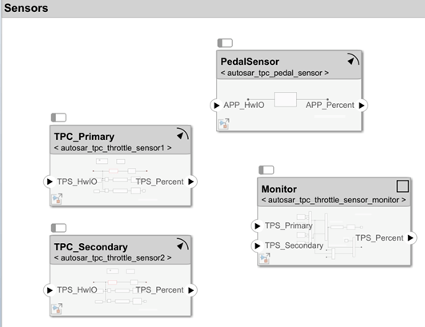
Откройте блок Sensors так, чтобы холст модели показал содержимое состава. В составе добавьте компоненты программного обеспечения AUTOSAR под названием TPS_Primary, TPS_Secondary, Монитор и PedalSensor. Например, на вкладке Modeling, можно выбрать Software Component, чтобы создать каждого.
Затем вы добавляете, требуют и предоставляют порты компонентам, и затем соединяют порты компонента с другими блоками компонента или с корневыми портами состава. Чтобы добавить компонент требуют и обеспечивают порты, этот пример соединяет блоки Software Component с моделями реализации, в которых уже заданы порты.
Поведение приложения AUTOSAR задано его компонентами программного обеспечения AUTOSAR. После того, как вы вставите блоки Software Component в модель архитектуры AUTOSAR, можно добавить поведение Simulink в компоненты. Для каждого блока Software Component вы можете:
Создайте основанное на модели в интерфейсе блока.
Соединитесь с моделью реализации.
Создайте модель из AUTOSAR XML (ARXML) описание компонента.
Для удобства этот пример предоставляет модель реализации Simulink для каждого компонента AUTOSAR:
autosar_tpc_throttle_sensor1.slx для TPS_Primary компонента
autosar_tpc_throttle_sensor2.slx для TPS_Secondary компонента
autosar_tpc_throttle_sensor_monitor.slx для Монитора компонента
autosar_tpc_pedal_sensor.slx для PedalSensor компонента
Добавить поведение Simulink в компоненты:
В модели архитектуры откройте блок состава Датчиков, если это не уже открыто. В составе соедините каждый компонент датчика AUTOSAR с моделью Simulink, которая реализует ее поведение.
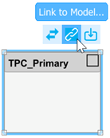
Например, выберите блок компонента TPS_Primary, установите ваш курсор на отображенный замещающий знак и выберите сигнал Link to Model.
В диалоговом окне Link to Model просмотрите к модели autosar_tpc_throttle_sensor1.slx реализации.
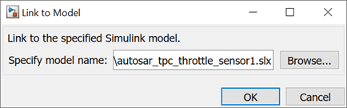
Чтобы соединить компонент с моделью реализации, нажмите OK.
Соедините компоненты TPS_Secondary, Монитор и PedalSensor к их моделям реализации. После того, как вы соедините каждую модель, можно изменить размер связанного блока компонента, чтобы лучше отобразить порты компонента.
Соединение блока Software Component к заданной модели реализации обновляет блок и интерфейсы модели, чтобы соответствовать. Если вы соединяетесь с моделью, которая использует корневой Inport и блоки Outport, программное обеспечение преобразует порты сигнала модели во входы шины. Чтобы просмотреть содержимое модели, откройте блок Software Component.
Соедините компоненты друг с другом и с корневыми портами состава.
Чтобы соединить компоненты, перетащите линию от порта провайдера компонента до другого порта приемника компонента.
Чтобы соединить компоненты с корневыми портами состава Датчиков, перетащите от порта компонента до контура состава Датчиков.
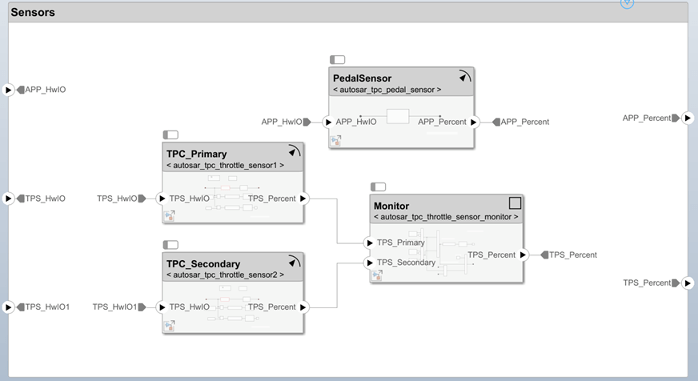
Опционально, чтобы точно совпадать с именованием корневого порта в модели autosar_tpc_composition в качестве примера, переименуйте порты TPS_HwIO и TPS_HwIO1 к TPS1_HwIO и TPS2_HwIO.
Завершать приложение управления положения дросселя:
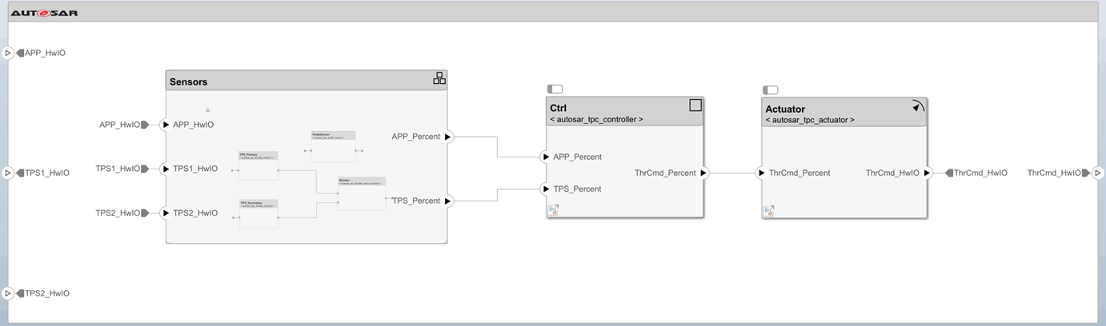
Возвратитесь к верхнему уровню модели архитектуры. Добавьте два блока Software Component и назовите их Ctrl и Actuator.
Соедините компоненты AUTOSAR Ctrl и Actuator к их моделям реализации Simulink, autosar_tpc_controller.slx и autosar_tpc_actuator.slx.
Соедините состав Датчиков, компонент Ctrl и компонент Привода друг другу и к контуру модели архитектуры.
Чтобы проверять на интерфейс или проблемы типа данных, обновите модель архитектуры. На вкладке Modeling выберите Update Model. Если какие-либо проблемы найдены, сравнивают вашу модель с моделью autosar_tpc_composition в качестве примера.
Сохраните модель с уникальным именем, таким как myTPC_Composition.slx.
Затем симулируйте поведение агрегированных компонентов в модели архитектуры AUTOSAR.
