Технология Bluetooth® [1] радиочастота малой мощности использования, чтобы включить ближнюю коммуникацию по низкой цене. Спецификация [2] Ядра Bluetooth, предоставленная Специальной группой (SIG) Bluetooth, добавила местоположение и функцию определения направления в Bluetooth низкой энергии (BLE). Коммуникация в BLE понята с помощью этих двух отличных физических уровней (ФИЗИКА).
LE Не закодирован: Этот PHY дальнейший отдельный в LE 1M PHY и LE 2M PHY. LE 1M является PHY по умолчанию и предоставляет уровень символа 1 Msym/s. Поддержка LE 1M обязательна во всех устройствах та поддержка BLE. LE 2M предоставляет уровень символа 2 Msym/s. Поддержка LE 2M является дополнительной для устройств, поддерживающих контроллер BLE.
Закодированный LE: Этот PHY оборудован для более длительной коммуникации области значений. Это имеет потенциал, чтобы увеличить в четыре раза область значений, которая может быть достигнута при сокращении скорости передачи данных. Поддержка LE Закодированный PHY является дополнительной для устройств, поддерживающих контроллер BLE.
Определение направления Bluetooth может использовать или LE 1M или LE 2M PHY, но не LE Закодированный PHY.
В течение нескольких лет Bluetooth использовался, чтобы обеспечить различные типы услуг по определению направления и местоположения. На высоком уровне эти сервисы могут быть разделены в две категории.
Решения для близости: Эта категория состоит из приложений информации об интересном месте (PoI) (например, музеи, которые предоставляют информацию о пользователе об артефактах в комнате). Эта категория также включает находящие элемент решения, такие как теги Bluetooth, которые помогают найти потерянные или положенные не на место элементы. В этих решениях теги Bluetooth периодически передают широковещательные кадры BLE. Точка доступа (AP) сканирует эти системы координат, чтобы получить данные меток Bluetooth и отправляет их в сервер местоположения через контроллер доступа (AC). В приложениях близости PoI определяя то, какая точка или PoIs находятся в непосредственной близости от расчетного местоположения, необходимо.
Системы позиционирования: Эта категория включает услуги на основе определения местоположения, чтобы усилить Bluetooth, чтобы найти физическое положение устройства. Видными примерами варианта использования в этой категории являются системы определения местоположения в реальном времени, используемые для отслеживания актива, люди, отслеживающие, и внутренние системы позиционирования раньше включали новаторские решения, которые помогают людям перейти через сложные внутренние сценарии. Для внутренних вариантов использования расположения нужны приложения, которые оценивают точное местоположение маяков, с которыми они сталкиваются так, чтобы местоположение отслеженного устройства, соответствующего известному местоположению маяка, могло быть вычислено. В некоторых случаях положение маяка может должно быть быть определено в трех измерениях, рассмотрев его x - и y - координирует в горизонтальной плоскости и его вертикальном изменении выше или ниже некоторой ссылочной высоты. Приложение может определить положение своего хост-устройства, только если это знает направление, из которого полученный сигнал прибывает, аппроксимированное расстояние до того маяка и местоположение маяка.
В приложениях включающие смартфоны, при вычислении направления сигнала, приложение должно рассмотреть ориентацию в трехмерном пространстве телефона.
Вне ранее упомянутых находящих местоположение сервисов сами приложения должны предпринять эти общие факторы.
Определение деталей антенной решетки: Чтобы точно получить и обработать выборочные данные IQ, приложения должны иметь детали антенной решетки в локальном устройстве (для угла прибытия (AoA)) или удаленное устройство (угол отъезда (AoD)). Профили приложений описывают, как приложения могут получить описание антенной решетки из удаленных устройств. Ожидайте, что API появятся для получения деталей антенных решеток в локальных и удаленных устройствах.
Конфигурирование параметров постоянного тонального расширения (CTE): Параметры, такие как длина CTE, длина шаблона переключения антенны и количество пакетов, которые включают CTE, чтобы передать на периодическое рекламное событие, управляют производством CTE. Эти параметры могут быть установлены посредством новых команд интерфейса хост-контроллера (HCI).
Конфигурирование и включение выборки IQ: Спецификация [2] Ядра Bluetooth задает серию параметров, чтобы сконфигурировать и инициировать выборку IQ. Эти параметры включают демонстрационную длительность паза (или 1 μs или 2 μs), длина переключающегося шаблона и идентификаторы антенн, которые будут включены в шаблон выборки.
Разработка алгоритмов и вычисление углов от выборочных данных IQ: SIG Bluetooth не определяет конкретный алгоритм как стандартный алгоритм определения направления. Выбор алгоритма оставляют прикладному уровню обратиться. Обычно это - область, в которой конкурируют производители и разработчики.
Технология маяка Bluetooth является приложением стандарта BLE. Маяк широковещательно передает отличный ID. Приложение на устройстве BLE, получающем тот ID, изучает базу данных, чтобы распознать маяк передачи и затем предоставляет пользователю информацию, связанную с местоположением того маяка. Этот рисунок показывает, что методы раньше оценивали расстояние между устройством BLE и маяком.
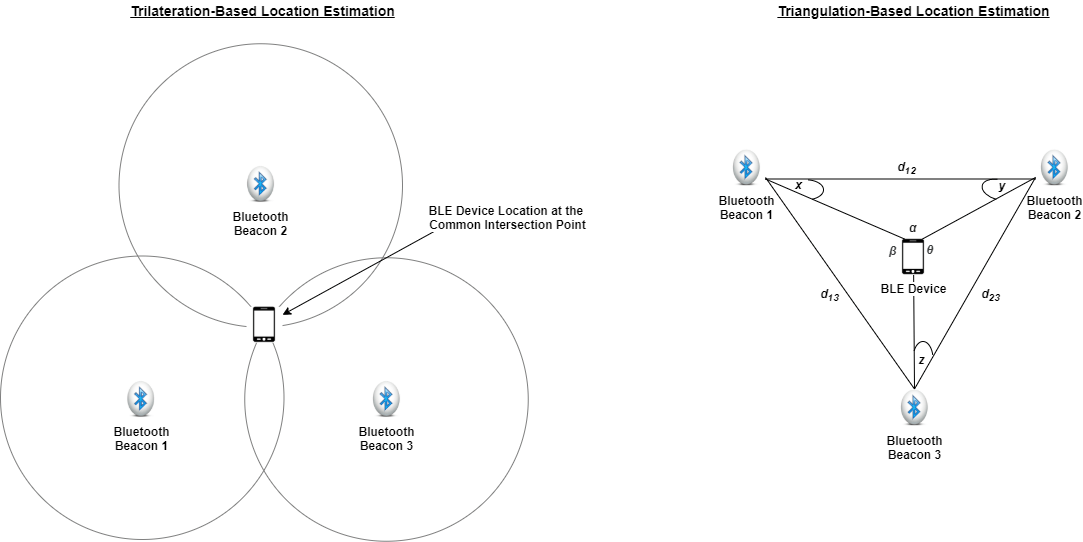
Основанная на трилатерации оценка местоположения: Трилатерация является одним из обычно используемого метода, чтобы оценить местоположение устройства. В этом методе должны быть известны местоположения по крайней мере двух ссылочных маяков Bluetooth и расстояния между ними. Однако, чтобы точно определить относительное местоположение узла, три маяка необходимы. Метод трилатерации использует значение полученного индикатора силы сигнала (RSSI), чтобы вычислить расстояние между маяками Bluetooth и устройством BLE. Значение RSSI помогает определить близость двух устройств BLE путем обеспечения точности уровня метра. Значение RSSI указывает на силу сигнала маяка, как замечено по получению устройство BLE. Как повышения стоимости RSSI, усиливается сигнал маяка. Это отношение помогает указать, когда устройство BLE находится в непосредственной близости от маяка. Поскольку направление сигнала маяка не может быть определено трилатерацией, местоположение устройства BLE может быть в любой точке на окружности круга. Однако идеальное местоположение устройства BLE в общей точке пересечения этих трех кругов. Из-за отсутствия информации, связанной с направлением сигнала маяка, эти три круга не могут всегда иметь общей точки пересечения.
В трилатерации преимущество использования значения RSSI состоит в том, что это не нуждается ни в каком дополнительном оборудовании или подвергается любой дополнительной коммуникации наверху. Наоборот, точности основанного на RSSI подхода препятствует точность модели потери пути, которую вы выбираете. Кроме того, этот подход не достаточно точен для нескольких вариантов использования. Даже если ссылочное значение RSSI эффективно калибруется, сначала устанавливая маяк Bluetooth, расчетное значение RSSI под влиянием условий окружающей среды, таких как присутствие уровней влажности и людей. Основанный на RSSI подход дает плохую точность, особенно во внутренних сценариях, которые заполнены препятствиями, такими как стенки и мебель. Эти препятствия являются источником многопутевого исчезновения и делают отношение между расстоянием и RSSI неточным.
Основанная на триангуляции оценка местоположения: Триангуляция является методом вычисления положения точки, которая использует известное расстояние между двумя или тремя контрольными точками, и углы измерили использование функции определения направления Bluetooth между теми контрольными точками к той точке. Этими углами может быть AoA или AoD. Для получения дополнительной информации смотрите Угол прибытия (AoA) и Угол отъезда (AoD). В отличие от трилатерации, которая реализует только измерения расстояния, метод триангуляции использует угловые измерения. С этим методом можно вычислить местоположение любой точки в 2D, учитывая эти три угла между точкой и другими тремя контрольными точками. Однако на 2D пробеле, минимум двух углов требуется, чтобы оценивать местоположение любой точки. Со ссылкой на предыдущую фигуру d 12, d 23, и d 13 обозначает расстояния между маяками Bluetooth 1–2, 2–3, и 1–3 соответственно. Углы x, y и z являются известными угловыми измерениями между устройством BLE и маяками Bluetooth 1, 2, и 3, соответственно. Используя эти известные измерения, метод триангуляции позволяет вам вычислить углы α, β, и θ. Следовательно, местоположение устройства BLE получено. Триангуляция является комплексным методом, который запрашивает информацию о местоположении и пространственном вращении маяков Bluetooth. Однако из-за возможностей AoA и AoD, триангуляция дает более точное местоположение устройства BLE по сравнению с методом трилатерации.
Чтобы точно определить местоположение устройства BLE, больше передовых решений должно реализовать несколько маяков Bluetooth и комплексных алгоритмов на основе методов триангуляции и трилатерации.
Спецификация [2] Ядра Bluetooth ввела новые возможности то высокоточное определение направления поддержки. Спецификация контроллера улучшена так, чтобы специализированное оборудование, которое включает антенную решетку, могло использоваться, чтобы определить направление полученного сигнала BLE. HCI изменяется так, чтобы данные, полученные контроллером, могли быть сделаны доступными для более высоких слоев стека, где вычисления направления могут произойти. Определение направления Bluetooth предлагает два отличных метода, каждый из которых использует тот же базовый базис. Эти методы определения направления – AoA и AoD.
Примечание
Возможности определения направления Bluetooth, AoA и AoD, введены в Спецификации 5.1 [2] Ядра Bluetooth.
Устройство BLE может отправить свою связанную с направлением информацию другой коллеге, которую устройство BLE путем передачи определения направления включило пакетам с помощью одной антенны. Коллега устройство BLE, состоящее из переключателя RF и антенной решетки, переключает антенны и получает полученное синфазное (I) и квадратура (Q) выборки. Устройство BLE использует их я и выборки Q, чтобы вычислить разность фаз в радио-сигнале, полученном различными элементами антенной решетки. Следовательно, расчетная разность фаз используется, чтобы оценить AoA. Этот рисунок иллюстрирует концепцию метода AoA.
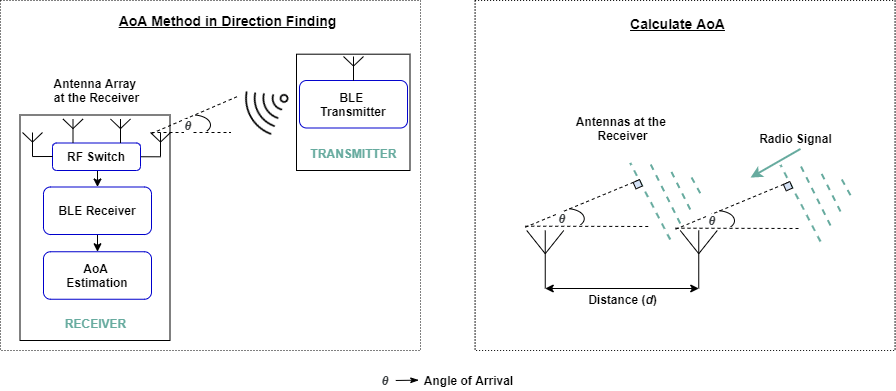
Устройство передатчика использует одну антенну, тогда как устройство приемника использует антенную решетку, обработанную переключателем RF. В приемнике d обозначает расстояние между двумя антеннами. Разность фаз, ψ, между сигналами, прибывающими в эти две антенны, вычисляются как:
λ длина волны сигнала, и θ является AoA. Чтобы избежать эффекта искажения, максимальное значение d должно быть λ/2. Перестраивая вышеупомянутое уравнение, AoA вычисляется как:
В отличие от этого, в AoA, метод AoD состоит из одной антенны в приемнике и нескольких антенн в передатчике. Передатчик BLE, состоящий из переключателя RF и антенной решетки, может сделать свой AoD обнаруживаемым путем отправки пакетов определения направления и затем переключения антенн в антенную решетку во время передачи. Приемник BLE получает пакеты с помощью одной антенны и получает меня и выборки Q. Направление сигнала определяется из различных задержек распространения сигнала BLE между несколькими антеннами антенной решетки и одной приемной антенны. Этот рисунок иллюстрирует концепцию метода AoD.
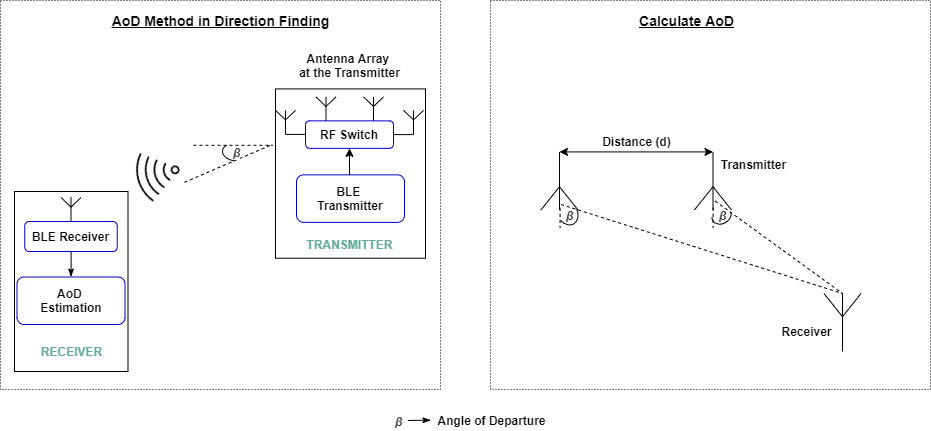
Устройство приемника использует одну антенну, тогда как устройству передатчика обработал антенную решетку переключатель RF. В передатчике d обозначает расстояние между двумя антеннами. Разность фаз, ψ, между сигналами, прибывающими в эти две антенны, вычисляются как:
λ длина волны сигнала, и β является AoD. Путем реорганизации вышеупомянутого уравнения AoD вычисляется как:
Основное использование антенных решеток должно направить излученный сигнал к желаемому угловому сектору. Номер, геометрический проект, относительные амплитуды и относительные фазы элементов антенной решетки зависят от желаемого углового шаблона. Если антенная решетка спроектирована, чтобы фокусироваться в определенном направлении, массив может также управляться в другом направлении путем изменения относительных фаз элементов массива. Этот рисунок показывает некоторые обычно используемые проекты антенной решетки.
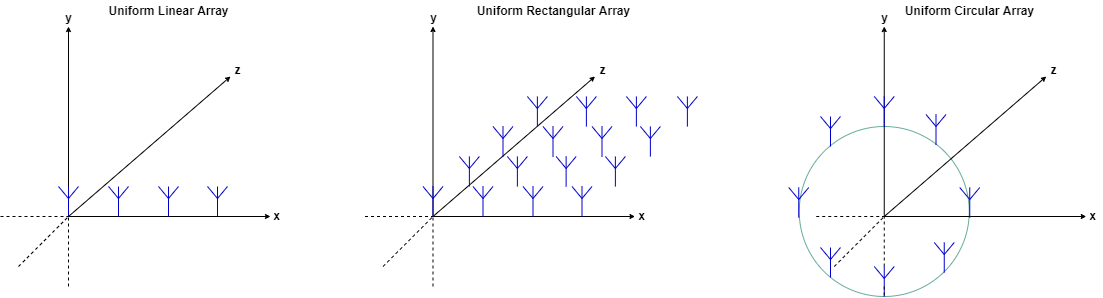
В случае универсальной линейной матрицы (ULA) антенные элементы расположены в одной строке. В случае универсального прямоугольного массива (URA) антенные элементы расположены вдоль прямоугольной сетки. Универсальный круговой массив (UCA) позволяет антенным элементам быть помещенными вдоль окружности круга. Геометрические проекты ULAs просты и позволяют только одному углу быть вычисленным от сигнала. Более комплексные проекты антенной решетки могут позволить двум или трем углам быть определенными. Вычисление вертикального изменения и углов азимута сигнала относительно базовой плоскости распространено в этих антенных решетках. Этот рисунок показывает концепцию углов азимута и вертикального изменения.
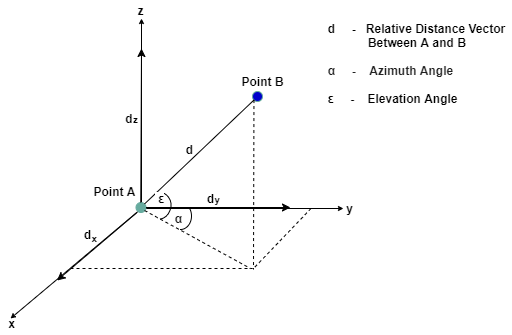
d является относительным вектором расстояния между точками A и B. dx, dy и dz обозначают компоненты d вдоль x - y - и z - ось, соответственно. Используя эту информацию, угол азимута (α) и угол возвышения (ϵ) между точками A и B вычисляется как:
Сигналы определения направления Bluetooth являются важной частью метода определения направления Bluetooth. Сигналы определения направления обеспечивают источник постоянного материала сигнала, к которому может быть применена выборка IQ. Новые модули данных о протоколе слоя ссылки (LL) (PDUs) идентифицированы для определения направления между два соединил устройства BLE. Кроме того, Спецификация [2] Ядра Bluetooth позволяет вам использовать существующую рекламу PDUs для целей определения направления без установления соединения. В этих случаях дополнительная информация, известная, когда, CTE добавлен к PDUs. Чтобы вычислить AoA и AoD, сигналы определения направления Bluetooth используют эти пакетные поля структуры BLE.
Этот рисунок показывает пакетную структуру для BLE незакодированный PHY, работающий с LE 1M и LE 2M. Поле CTE добавлено в конце пакетной структуры.

CTE содержит серию символов, каждый представляющий двоичный файл 1. Количество символов в поле CTE сконфигурировано более высокими слоями так, чтобы подходящий объем данных и время был доступен для выборки IQ.
Примечание
Для получения дополнительной информации о CTE, смотрите объем 6, Часть B, Раздел 2.5.1 из Спецификации [2] Ядра Bluetooth.
В данном радио-канале Bluetooth использует две частоты, один, чтобы обозначить цифровой 0s и другой, чтобы обозначить цифровую 1 с. Эти две частоты вычисляются путем добавления или вычитания отклонения частоты к или от центральной частоты канала. Любое изменение в частоте также изменяет длину волны. Длина волны является важным фактором в вычислении направления от выборок IQ. Поэтому CTE состоит только из цифровой 1 с. Это подразумевает, что целый CTE передается на одной частоте и имеет постоянную длину волны.
Каждый пакет BLE содержит поле CRC, которое используется в выявлении ошибок. Передатчик BLE вычисляет значение CRC от остатка от пакета, который будет передан, добавляет CRC в конец пакета и передает пакет. Приемник BLE выполняет то же вычисление и сравнивает вычисленное значение CRC с добавленным значением CRC. Если значения CRC неравны, ошибка связи произошла. Это вызывает изменение в одном или нескольких переданных битов. В этом случае пакет проигнорирован приемником BLE и может ретранслироваться передатчиком BLE.
Примечание
Значение CTE в пакетах определения направления не включено в вычисление CRC.
Если связь между передатчиком BLE и приемником шифруется и аутентифицируется, PDU LL включает поле MIC. Значение MIC используется, чтобы аутентифицировать отправителя PDU.
Примечание
Значение CTE в пакетах определения направления не включено в вычисление MIC.
Отбеливание посылает к процессу скремблирования битов избежать длинных последовательностей 1 с и 0s в переданном потоке битов. Длинные последовательности 1 с и 0s силы заставляют приемник терять свою блокировку частоты и действие, как будто центральная частота переместилась вверх или вниз. Отбеливание использования BLE, чтобы скремблировать поля PDU и CRC всех пакетов LL.
Примечание
Значение CTE в пакетах определения направления не подвергается процессу отбеливания.
Спецификация [2] Ядра Bluetooth позволяет AoA и AoD использоваться или в коммуникации с установлением соединения или в без установления соединения. Однако в типичных вариантах использования, AoD используется с коммуникацией без установления соединения, и AoA используется с коммуникацией с установлением соединения. Эта таблица показывает четыре возможных сочетания использования AoA и AoD с коммуникацией с установлением соединения и без установления соединения.
| Тип связи | AoA | AoD |
|---|---|---|
| Без установления соединения | Контроллер BLE поддержка является дополнительным. | Контроллер BLE поддержка является дополнительным. Используя AoD с коммуникацией без установления соединения типично. |
| С установлением соединения | Контроллер BLE поддержка является дополнительным. Используя AoA с коммуникацией с установлением соединения типично. | Контроллер BLE поддержка является дополнительным. |
Определение направления без установления соединения реализует Bluetooth периодическая реклама. CTE добавлен к в противном случае стандартному AUX_SYNC_IND PDUs. Определение направления с установлением соединения передает CTE использование новых пакетов LL_CTE_RSP, которые передаются по связи как подтверждение к LL_CTE_REQ PDUs. В обоих из этих случаев должно быть завершено разнообразие настройки и шагов настройки, прежде чем выборка IQ инициируется, и пакеты CTE-подшипника сгенерированы.
С возможностью определения направления Bluetooth близость и системы позиционирования, действующие в точности подметра, могут быть разработаны для вариантов использования, таких как внутреннее расположение, открытие пути, отслеживание актива и направленное открытие. Возможность определения направления Bluetooth поднимает доказанную технику для направления сигнала. Эта возможность также стандартизирует интерфейсы, взаимодействия и видные внутренние операции стека BLE. Точное определение направления теперь совместимо через различных производителей и может быть широко принято, чтобы создать новое поколение усовершенствованного местоположения Bluetooth и услуг по определению направления.
[1] Технологический Веб-сайт Bluetooth. “Технологический Веб-сайт Bluetooth | официальный сайт Технологии Bluetooth”. Полученный доступ 22 ноября 2019. https://www.bluetooth.com/.
[2] Специальная группа (SIG) Bluetooth. "Спецификация Ядра Bluetooth". Версия 5.1. https://www.bluetooth.com/.
[3] Suryavanshi, Нитеш Б., К. Висвавардхэн Редди и Вишну Р. Чандрика. “Возможность Определения направления в Стандарте Bluetooth 5.1”. В Ubiquitous Communications и Сетевом Вычислении, отредактированном Навином Кумаром и Р. Венкэтешей Прасадом, 53–65. Читайте лекции Примечаниям Института Информатики, Социальной Информатики и Телекоммуникационной Разработки. Хан: Springer International Publishing, 2019.
