Как пример проекта LQG, рассмотрите следующую задачу регулирования.
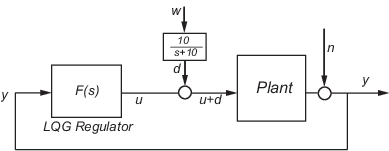
Цель состоит в том, чтобы отрегулировать объект выход y вокруг нуля. Входное воздействие d является низкой частотой со степенью спектральной плотностью (PSD), сконцентрированной ниже 10 рад/с. Поскольку LQG проектируют цели, это моделируется как белый шум, управляющий фильтром lowpass с сокращением на уровне 10 рад/с, показанных в следующем рисунке.
![]()
Для простоты этот шум моделируется как Гауссов белый шум с отклонением 1.
Следующий рисунок показывает Предвещать величину формирующий фильтра.
Предвещайте величину фильтра Lowpass
Существует некоторый шум измерения n с шумовой интенсивностью, данной
Используйте функцию стоимости
задавать компромисс между эффективностью регулирования и стоимостью управления. Следующие уравнения представляют модель в пространстве состояний разомкнутого контура:
где (A, B, C) реализация пространства состояний .
Следующие команды проектируют оптимальный регулятор LQG F (s) для этой проблемы:
sys = ss(tf(100,[1 1 100])) % State-space plant model % Design LQ-optimal gain K K = lqry(sys,10,1) % u = -Kx minimizes J(u) % Separate control input u and disturbance input d P = sys(:,[1 1]); % input [u;d], output y % Design Kalman state estimator Kest. Kest = kalman(P,1,0.01) % Form LQG regulator = LQ gain + Kalman filter. F = lqgreg(Kest,K)
Эти команды возвращают модель в пространстве состояний F из регулятора LQG F (s). lqryКалман, и lqgreg функции выполняют дискретное время проект LQG, когда вы применяете их к дискретным объектам.
Чтобы подтвердить проект, замкните круг с feedback, создайте и добавьте фильтр lowpass последовательно с системой с обратной связью и сравните открытое - и импульсные характеристики с обратной связью при помощи impulse функция.
% Close loop
clsys = feedback(sys,F,+1)
% Note positive feedback.
% Create the lowpass filter and add it in series with clsys.
s = tf('s');
lpf= 10/(s+10) ;
clsys_fin = lpf*clsys;
% Open- vs. closed-loop impulse responses
impulse(sys,'r--',clsys_fin,'b-')
Эти команды производят следующую фигуру, которая сравнивает открытое - и импульсные характеристики с обратной связью для этого примера.
Сравнение открытых - и импульсная характеристика с обратной связью