Пакет: TuningGoal
Требование подавления помех для настройки системы управления
Используйте TuningGoal.Rejection задавать минимальное затухание воздействия, введенного в заданном местоположении в системе управления. Эта настраивающая цель помогает вам настроить системы управления с настраивающимися командами, такими как systune или looptune.
Когда вы используете TuningGoal.Rejection, программное обеспечение пытается настроить систему так, чтобы затухание воздействия в заданном местоположении превысило минимальный фактор затухания, который вы задаете. Этот фактор затухания является отношением между открытым - и чувствительностью с обратной связью к воздействию и является функцией частоты. Можно достигнуть затухания воздействия только в пропускной способности управления. Усиление цикла должно быть больше, чем одно для воздействия, которое будет ослаблено (фактор затухания> 1).
Req =
TuningGoal.Rejection(distloc,attfact)distloc. Эта настраивающая цель ограничивает минимальный фактор затухания воздействия к зависимому частотой значению, attfact.
|
Местоположение воздействия в виде вектора символов или, для нескольких - входные настраивающие цели, массив ячеек из символьных векторов.
|
|
Фактор затухания в зависимости от частоты в виде числовой модели LTI.
attfact = frd([100 100 1 1],[0 1 10 100]);
Req = TuningGoal.Rejection('u',attfact);
bodemag(attfact)
ylim([-5,40])
Когда вы используете Если вы настраиваетесь в дискретное время (то есть, с помощью a |
|
Минимальное затухание воздействия в зависимости от частоты, описанной как SISO Программное обеспечение автоматически сопоставляет |
|
Диапазон частот, в котором настройка цели осуществляется в виде вектора-строки из формы Установите Req.Focus = [1,100]; Значение по умолчанию: |
|
Переключитесь для того, чтобы автоматически масштабировать сигналы цикла в виде Для многоконтурного или настраивающих целей подавления помех MIMO, каналы обратной связи автоматически перемасштабируются, чтобы компенсировать недиагональное (взаимодействие цикла) условия в передаточной функции разомкнутого контура. Установите Значение по умолчанию: |
|
Местоположение воздействия в виде массива ячеек из символьных векторов, которые идентифицируют одну или несколько аналитических точек в системе управления, чтобы настроиться. Например, если Начальное значение |
|
Модели, к которым настраивающаяся цель применяется в виде вектора из индексов. Используйте Req.Models = 2:4; Когда Значение по умолчанию: |
|
Обратная связь, чтобы открыться при оценке настраивающейся цели в виде массива ячеек из символьных векторов, которые идентифицируют открывающие цикл местоположения. Настраивающаяся цель оценена против настройки разомкнутого контура, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Если вы используете настраивающуюся цель настроить модель Simulink системы управления, то Если вы используете настраивающуюся цель настроить обобщенное пространство состояний ( Например, если Значение по умолчанию: |
|
Имя настраивающейся цели в виде вектора символов. Например, если Req.Name = 'LoopReq'; Значение по умолчанию: |
Создайте настраивающуюся цель, которая осуществляет затухание, по крайней мере, фактора 10 между 0 и 5 рад/с. Настраивающаяся цель применяется к воздействию, вводящему систему управления в точке, идентифицированной как 'u'.
Req = TuningGoal.Rejection('u',10);
Req.Name = 'Rejection spec';
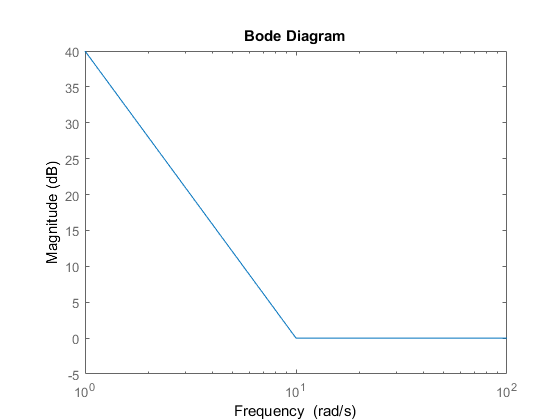
Req.Focus = [0 5]Создайте настраивающуюся цель, которая осуществляет фактор затухания по крайней мере 100 на 40 дБ ниже 1 рад/с, постепенно спадая до 1 прошлого 10 рад/с (на 0 дБ). Настраивающаяся цель применяется к воздействию, вводящему систему управления в точке, идентифицированной как 'u'.
attfact = frd([100 100 1 1],[0 1 10 100]);
Req = TuningGoal.Rejection('u',attfact);Эти команды используют frd модель, чтобы задать минимальное затухание профилирует в зависимости от частоты. Минимальное затухание 100 ниже 1 рад/с, вместе с минимальным затуханием 1 на частотах 10 и 100 рад/с, задает желаемый спад.
attfact преобразован в сглаженную функцию частоты, которая аппроксимирует кусочный заданный профиль. Отобразите профиль усиления с помощью viewGoal.
viewGoal(Req)

Теневая область указывает, где настраивающаяся цель нарушена.
Эта настраивающая цель налагает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в Location, оцененный с циклами, открытыми в точках, идентифицирован в Openings. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. MinDecay и MaxRadius опции systuneOptions управляйте границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, использовать systuneOptions изменить эти значения по умолчанию.
Когда вы настраиваете систему управления с помощью TuningGoal, программное обеспечение преобразует настраивающуюся цель в нормированное скалярное значение f (x). В этом случае x является вектором из свободных (настраиваемых) параметров в системе управления. Значения параметров настроены автоматически, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для TuningGoal.Rejection, f (x) дают:
или его эквивалентное дискретное время. Здесь, S (jω, x) является функцией чувствительности с обратной связью, измеренной в местоположении воздействия. Ω является интервалом частоты, на котором настраивающаяся цель осуществлена, задана в Focus свойство. WS является функцией взвешивания частоты, выведенной из заданного профиля затухания. Усиления WS и MinAttenuation примерно соответствуйте для значений усиления в пределах от-20 дБ к 60 дБ. По числовым причинам функция взвешивания выравнивается вне этой области значений, если заданный профиль затухания не изменяет наклон вне этой области значений. Эта корректировка называется regularization. Поскольку полюса WS близко к s = 0 или s = Inf может привести к плохому числовому созданию условий systune задача оптимизации, не рекомендуется задать профили затухания с очень низкочастотной или очень высокочастотной динамикой.
Чтобы получить WS, используйте:
WS = getWeight(Req,Ts)
где Req настраивающаяся цель и Ts шаг расчета, в котором вы настраиваетесь (Ts = 0 в течение непрерывного времени). Для получения дополнительной информации о регуляризации и ее эффектах, смотрите, Визуализируют Настраивающиеся Цели.
looptune | systune | TuningGoal.LoopShape | TuningGoal.Tracking | viewGoal | looptune (for slTuner) (Simulink Control Design) | slTuner (Simulink Control Design) | systune (for slTuner) (Simulink Control Design)