Прямой КИХ формы fullband фильтр дифференциатора
dsp.Differentiator Система object™ применяет fullband фильтр дифференциатора на входной сигнал, чтобы дифференцировать все его частотные составляющие. Этот объект использует КИХ equiripple создание фильтра, чтобы спроектировать фильтр дифференциатора. Идеальная частотная характеристика дифференциатора для . Можно спроектировать фильтр с минимальным порядком с заданным порядком. Эта фиксированная точка поддержки объектов операции.
Отфильтровать каждый канал вашего входа:
Создайте dsp.Differentiator объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?.
DF = dsp.DifferentiatorDF, который независимо фильтрует каждый канал входа в зависимости от времени с помощью данных технических требований проекта.
DF = dsp.Differentiator(Name,Value)
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Примечание: Этот пример запускается только в R2016b или позже. Если вы используете более ранний релиз, заменяете каждый вызов функции с эквивалентным step синтаксис. Например, myObject (x) становится шагом (myObject, x).
Оцените групповую задержку КИХ-фильтра линейной фазы с помощью dsp.TransferFunctionEstimator объект сопровождается dsp.PhaseExtractor и dsp.Differentiator объекты. Групповой задержкой КИХ-фильтра линейной фазы дают , где
, где информация о фазе фильтра,
информация о фазе фильтра, действительно ли частота, вектор, и N является порядком фильтра.
действительно ли частота, вектор, и N является порядком фильтра.
Настройте объекты
Создайте линейную фазу FIR фильтр lowpass. Установите порядок к 200, частоту полосы пропускания к 255 Гц, неравномерность в полосе пропускания к 0,1 дБ и затухание в полосе задерживания к 80 дБ. Задайте частоту дискретизации 512 Гц.
Fs = 512; LPF = dsp.LowpassFilter('SampleRate',Fs,'PassbandFrequency',255,... 'DesignForMinimumOrder',false,'FilterOrder',200);
Чтобы оценить передаточную функцию фильтра lowpass, создайте средство оценки передаточной функции. Задайте окно, чтобы быть Hann. Установите длину БПФ на 1 024 и количество спектральных средних значений к 200.
TFE = dsp.TransferFunctionEstimator('FrequencyRange','twosided',... 'SpectralAverages',200,'FFTLengthSource','Property',... 'FFTLength',1024);
Чтобы извлечь развернутую фазу из частотной характеристики фильтра, создайте экстрактор фазы.
PE = dsp.PhaseExtractor;
Чтобы дифференцировать фазу , создайте фильтр дифференциатора. Это значение используется в вычислении групповой задержки.
, создайте фильтр дифференциатора. Это значение используется в вычислении групповой задержки.
DF = dsp.Differentiator;
Чтобы сгладить вход, создайте переменный КИХ-фильтр пропускной способности.
Gain1 = 512/pi; Gain2 = -1; VBFilter = dsp.VariableBandwidthFIRFilter('CutoffFrequency',10,... 'SampleRate',Fs);
Чтобы просмотреть групповую задержку фильтра, создайте объект графика массивов.
AP = dsp.ArrayPlot('PlotType','Line','YLimits',[-500 400],... 'YLabel','Amplitude','XLabel','Number of samples');
Запустите алгоритм
for- цикл является циклом потоковой передачи, который оценивает групповую задержку фильтра. В цикле алгоритм фильтрует входной сигнал, оценивает передаточную функцию фильтра и дифференцирует фазу фильтра, чтобы вычислить групповую задержку.
Niter = 1000; % Number of iterations for k = 1:Niter x = randn(512,1); % Input signal = white Gaussian noise y = LPF(x); % Filter noise with Lowpass FIR filter H = TFE(x,y); % Compute transfer function estimate Phase = PE(H); % Extract the Unwrapped phase phaseaftergain1 = Gain1*Phase; DiffOut = DF(phaseaftergain1); % Differentiate the phase phaseaftergain2 = Gain2 * DiffOut; VBFOut = VBFilter(phaseaftergain2); % Smooth the group delay AP(VBFOut); % Display the group delay end

Как вы видите, групповая задержка фильтра lowpass равняется 100.
Создайте волну FM на сигнале поставщика услуг на 100 Гц, произведенном на уровне 1,5 кГц.
Fc = 1e2; % Carrier Fs = 1.5e3; % Sample rate sinewave = dsp.SineWave('Frequency',10,... 'SamplesPerFrame',1e3,... 'SampleRate',Fs);
Преобразуйте сигнал FM в сигнал AM.
ts = timescope(2,... 'TimeSpanSource','Property',... 'TimeSpan',0.3,... 'BufferLength',10*Fs,... 'SampleRate',Fs,... 'ShowGrid',true,... 'YLimits',[-1.5 1.5],... 'LayoutDimensions',[2 1]); df = dsp.Differentiator; tic while toc<2.2 x = step(sinewave); fm_y = modulate(x,Fc,Fs,'fm'); am_y = step(df,fm_y); step(ts,fm_y,am_y); end release(df); release(ts);

Дифференциатор вычисляет производную сигнала. Частотной характеристикой идеального фильтра дифференциатора дают , заданный на интервале Найквиста .
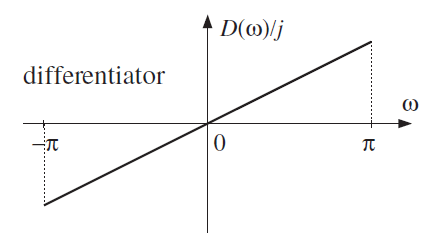
Частотная характеристика антисимметрична и линейно пропорциональна частоте.
dsp.Differentiator возразите действиям как фильтру дифференциатора. Этот объект уплотняет двухступенчатый процесс в один. Для проекта минимального порядка, объектное использование обобщенный КИХ-алгоритм создания фильтра Remez. Для заданного проекта порядка объект использует Парки-McClellan оптимальный equiripple КИХ-алгоритм создания фильтра. Фильтр спроектирован как линейный фильтр фазы Type-IV FIR с Прямой структурой формы.
Идеальному дифференциатору дали антисимметричную импульсную характеристику . Следовательно . Дифференциатор должен иметь нулевой ответ на нулевой частоте.
КИХ-фильтр дифференциатора линейной фазы
Импульсной характеристикой антисимметричного КИХ-фильтра линейной фазы дают , где M является длиной фильтра. Поскольку фильтр антисимметричен, можно использовать этот тип КИХ-фильтра, чтобы спроектировать КИХ-дифференциаторы линейной фазы.
Рассмотрите проект КИХ-дифференциаторов линейной фазы на основе Чебышевского критерия приближения.
Если M является нечетным, частотная характеристика с действительным знаком КИХ-фильтра, Час (ω), имеет характеристики тот Час (0) = 0 и Час (π) = 0. Этот фильтр удовлетворяет условию нулевого ответа на нулевой частоте. Однако это не fullband потому что Час (π) = 0. Этот дифференциатор имеет линейный ответ по ограниченному частотному диапазону [0 2πfp], где fp является пропускной способностью дифференциатора. Абсолютная погрешность между желаемым ответом и Чебышевскими увеличениями приближения как ω увеличивается от 0 до 2πfp.
Если M является четным, частотная характеристика с действительным знаком КИХ-фильтра, Час (ω), имеет характеристики тот Час (0) = 0 и Час (π) ≠ 0. Этот фильтр удовлетворяет условию нулевого ответа на нулевой частоте. Это - fullband и этот проект результаты по значительно меньшей ошибке приближения, чем сопоставимые дифференциаторы нечетной длины. Следовательно, ровная длина (нечетный порядок) дифференциаторы предпочтена в практических системах.
[1] Orfanidis, Софокл Дж. Введение в обработку сигналов. Верхний Сэддл-Ривер, NJ: Prentice Hall, 1996.
dsp.BiquadFilter | dsp.FIRFilter | dsp.HighpassFilter | dsp.VariableBandwidthFIRFilter | dsp.VariableBandwidthIIRFilter