Якобиан постоянной угловой скорости вращения прямоугольная целевая модель движения
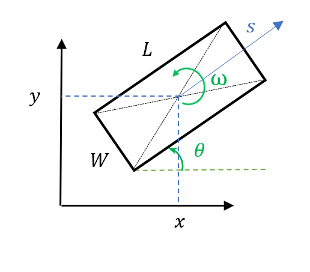
state — Текущее состояниеТекущее состояние в виде 1 7 вектора с действительным знаком. Насыщением постоянного поворота прямоугольная целевая модель является [x; y; s; θ; ω; L; W. Значение этих переменных и их модулей:
| Переменная | Значение | Модуль |
| x | Положение прямоугольника сосредотачивается в направлении x | m |
| y | Положение прямоугольника сосредотачивается в направлении y | m |
| s | Скорость в направляющемся направлении | m/s |
| θ | Угол ориентации прямоугольника относительно направления x | градус |
| ω | Угловая скорость вращения | degree/s |
| L | Длина прямоугольника | m |
| W | Ширина прямоугольника | m |
Пример: [1;2;2;30;1;4.7;1.8]
Типы данных: single | double
dt — Временной шагВременной шаг в виде положительной скалярной величины с действительным знаком во втором.
Типы данных: single | double
w — Шум процессаШум процесса в виде вектора с действительным знаком с 2 элементами. Первый элемент задает шум процесса на линейном ускорении (m/s2). Второй элемент задает шум процесса на ускорении рыскания (degrees/s2).
Типы данных: single | double
ctrect | ctrectcorners | ctrectmeas | ctrectmeasjac | gmphd | initctrectgmphd | trackerPHD
