Оцените и подтвердите простой, передаточные функции непрерывного времени от single-input/single-output (SISO) данные, чтобы найти тот, который лучше всего описывает системную динамику.
После завершения этого примера вы сможете выполнить следующие задачи с помощью приложения System Identification:
Импортируйте объекты данных из рабочей области MATLAB® в приложение.
Постройте и обработайте данные.
Оцените и подтвердите младший разряд, модели непрерывного времени из данных.
Экспортируйте модели в рабочее пространство MATLAB.
Симулируйте модель с помощью программного обеспечения Simulink®.
Примечание
Этот пример использует данные временного интервала, чтобы продемонстрировать, как можно оценить линейные модели. Тот же рабочий процесс применяется к подходящим данным частотного диапазона.
Этот пример использует файл данных proc_data.mat, который содержит 200 выборок симулированного single-input/single-output (SISO) данные временного интервала. Вход является случайным двоичным сигналом, который колеблется между-1 и 1. Белый шум (соответствие воздействию загрузки) добавляется к входу со стандартным отклонением 0,2, который приводит к отношению сигнал-шум приблизительно 20 дБ. Эти данные симулированы с помощью системы второго порядка с underdamped режимами (комплексные полюса) и максимальная чувствительность на уровне 1 рад/с:
Шаг расчета симуляции составляет 1 секунду.
Модели процессов непрерывного времени являются передаточными функциями младшего разряда, которые описывают системную динамику с помощью статического усиления, задержка перед системой, выход отвечает на вход и характеристические постоянные времени, сопоставленные с полюсами и нулями. Такие модели популярны в промышленности и часто используются для настройки ПИД-регуляторов, например. Параметры модели процесса имеют физическое значение.
Можно задать различные структуры модели процесса путем варьирования количества полюсов, добавления интегратора, или включая задержку или нуль. Самая высокая модель процесса приказывает, чтобы можно было задать в этом тулбоксе, три, и полюса могут быть действительными или комплексными (underdamped режимы).
В общем случае линейная система характеризуется передаточной функцией G, который является оператором, который берет вход u к выходу y:
Для системы непрерывного времени G связывает Преобразования Лапласа входа U (s) и выход Y (s), можно следующим образом:
В этом примере вы оцениваете G использование различных структур модели процесса.
Например, следующая структура модели является первым порядком, моделью непрерывного времени, где K является статическим усилением, Tp1 является постоянной времени, и Td является задержкой входа к выходу:
Загрузите данные в proc_data.mat путем ввода следующей команды в командном окне MATLAB:
load proc_data
Эта команда загружает данные в рабочее пространство MATLAB как объект данных z. Для получения дополнительной информации о iddata объекты, смотрите соответствующую страницу с описанием.
Чтобы открыть приложение System Identification, введите следующую команду в командном окне MATLAB:
systemIdentification
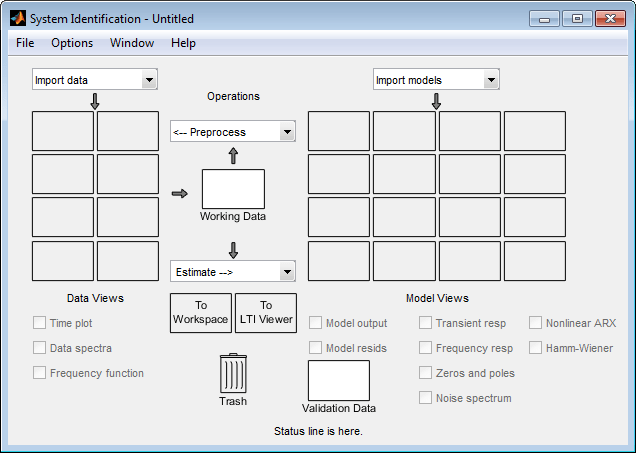
Имя сеанса по умолчанию, Untitled, появляется в строке заголовка.
Можно импортировать объект данных в приложение от рабочего пространства MATLAB.
Вы, должно быть, уже загрузили выборочные данные в MATLAB, как описано в Загрузке Данных в рабочее пространство MATLAB, и открыли приложение, как описано в Открытии Приложения System Identification.
Если вы не выполнили эти шаги, щелкните здесь, чтобы завершить их.
Импортировать объект данных в приложение System Identification:
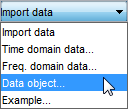
Выберите Import data> Data object.
Это действие открывает диалоговое окно Import Data.
В диалоговом окне Import Data задайте следующие опции:
Объект Введите z как имя переменной MATLAB, которая является объектом данных временного интервала. Нажмите Enter.
Data name — Используйте имя по умолчанию z, который совпадает с именем объекта данных, вы импортируете. Это этикетки данные в приложении System Identification после операции импорта завершается.
Starting time — Введите 0 как время начала. Это значение определяет начальное значение оси времени на графиках временной зависимости.
Размер шага Введите 1 как время между последовательными выборками в секундах. Это значение представляет фактический шаг расчета в эксперименте.
Диалоговое окно Import Data теперь напоминает следующую фигуру.
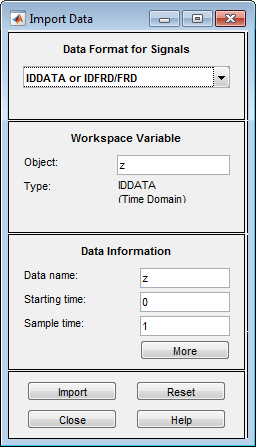
Нажмите Import, чтобы добавить данные в приложение System Identification. Приложение добавляет значок, чтобы представлять данные.

Нажмите Close, чтобы закрыть диалоговое окно Import Data.
В этом фрагменте примера вы оцениваете данные и обрабатываете его для системы идентификации. Вы учитесь как:
Отобразите данные на графике.
Удалите смещения путем вычитания средних значений входа и выхода.
Разделите данные в две части. Вы используете одну часть данных для оценки модели и другую часть данных для проверки допустимости модели.
Причина вы вычитаете средние значения из каждого сигнала, состоит в том, потому что, обычно, вы создаете линейные модели, которые описывают ответы для отклонений от физического равновесия. С установившимися данными разумно принять, что средние уровни сигналов соответствуют такому равновесию. Таким образом можно искать модели вокруг нуля, не моделируя абсолютные уровни равновесия в физических единицах измерения.
Вы, должно быть, уже импортировали данные в приложение System Identification, как описано в Импорте Объектов данных в Приложение System Identification.
Если вы не выполнили этот шаг, щелкните здесь, чтобы завершить его.
Построить и обработать данные:
Установите флажок Time plot, чтобы открыть окно Time Plot.

Нижние оси показывают входные данные — случайная двоичная последовательность, и главные оси показывают выходные данные.
Следующие два шага демонстрируют, как изменить пределы по осям в графике.
Чтобы изменить вертикальные пределы по осям для входных данных, выберите Options> Set axes limits в окне рисунка Графика временной зависимости.
В диалоговом окне Limits for Time Plot, набор новый вертикальный предел по осям входных данных образовывают канал u1 к [-1.5 1.5]. Нажмите Apply и Close.
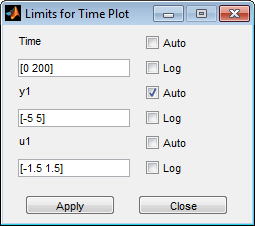
Примечание
Другие два поля в диалоговом окне Limits for Time Plot, Time и y1, позволяют вам установить пределы по осям для оси времени и выходной оси канала, соответственно. Можно также задать каждую ось, чтобы быть логарифмическими или линейными путем выбирания соответствующей опции.
Следующий рисунок показывает обновленный график временной зависимости.

В приложении System Identification выберите <--Preprocess> Quick start, чтобы выполнить следующие четыре действия:
Вычтите среднее значение из каждого канала.
Разделите данные в две части.
Задайте первую часть данных как данные об оценке (или Working Data).
Задайте вторую часть данных как Validation Data.
Узнать больше. Для получения информации о поддерживаемых операциях обработки данных, таких как передискретизация и фильтрация данных, видят, Предварительно обрабатывают Данные.
В этом фрагменте примера вы оцениваете модели с этой структурой:
Вы, должно быть, уже обработали данные для оценки, как описано в Графическом выводе и Обработке Данных.
Если вы не выполнили этот шаг, щелкните здесь, чтобы завершить его.
Идентифицировать передаточную функцию второго порядка:
В приложении System Identification выберите Estimate> Process models, чтобы открыть диалоговое окно Process Models.

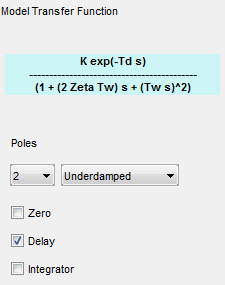
В области Model Transfer Function диалогового окна Process Models задайте следующие опции:
Под Poles выберите 2 и Underdamped.
Этот выбор обновляет Передаточную функцию Модели к структуре модели второго порядка, которая может содержать комплексные полюса.
Убедитесь, что флажки Zero и Integrator снимаются, чтобы исключить нуль и интегратор (автономный) из модели.
Область Parameter диалогового окна Process Models теперь показывает четыре активных параметра: K, Tw\zeta, и Td. В области Initial Guess сохраните Auto-selected по умолчанию опция, чтобы вычислить начальные значения параметров во время оценки. Столбец Initial Guess в Таблице параметров отображает Auto.
Сохраните значения Bounds по умолчанию, которые задают минимальные и максимальные значения каждого параметра.
Совет
Если вы знаете область значений возможных значений для параметра, можно ввести эти значения в соответствующие поля Bounds, чтобы помочь алгоритму оценки. Нажмите клавишу Enter после того, как вы зададите значения.
Сохраните настройки по умолчанию для алгоритма оценки:
Disturbance Model — None средние значения, что алгоритм не оценивает шумовую модель. Эта опция также устанавливает Focus на Simulation.
Focus — Simulation средние значения, что алгоритм оценки не использует шумовую модель, чтобы взвесить относительную важность того, как тесно приспособить данные в различных частотных диапазонах. Вместо этого алгоритм использует входной спектр в конкретном частотном диапазоне, чтобы взвесить относительную важность подгонки в том частотном диапазоне.
Совет
Simulation установка оптимизирована для идентификации моделей, которые вы планируете использовать для выходной симуляции. Если вы планируете использовать свою модель для выходного предсказания, или приложения управления, или улучшить оценки параметра с помощью шумовой модели, выбирают Prediction.
Initial condition — Auto средние значения, что алгоритм анализирует данные и выбирает оптимальный метод для обработки начального состояния системы. Если вы получаете плохие результаты, вы можете попытаться установить определенный метод для обработки начальных состояний, вместо того, чтобы выбрать ее автоматически.
Ковариация Estimate средние значения, что алгоритм вычисляет неопределенность параметра, которая отображается как области доверия модели на графиках.
Приложение присваивает имя к модели, показанной в поле Name (расположенный в нижней части диалогового окна). По умолчанию имя является акронимом P2DU, который указывает на два полюса (P2), задержка (D), и режимы underdamped (U).
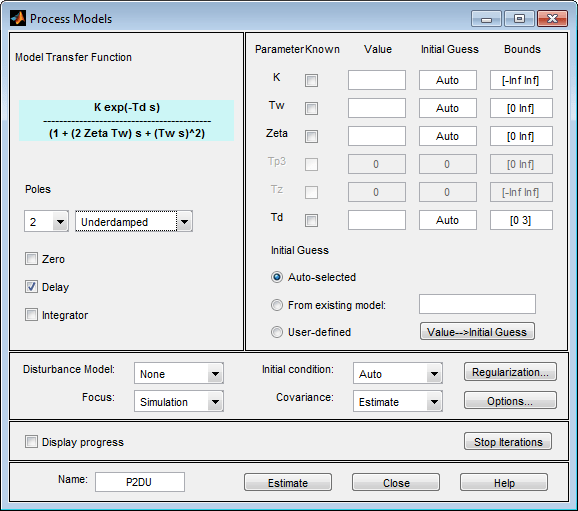
Нажмите Estimate, чтобы добавить модель P2DU к приложению System Identification.
Если вы знаете значение параметров точно, можно ввести это значение в столбце Value диалогового окна Process Models. Установите соответствующий флажок Known после того, как вы зададите значение.
Если вы знаете приближенное значение параметра, можно помочь алгоритму оценки путем ввода начального значения в столбец Initial Guess. В этом случае сохраните флажок Known очищенным, чтобы позволить оценке подстраивать это исходное предположение.
Например, чтобы зафиксировать значение с временной задержкой Td в 2s, введите это значение в поле Value Таблицы параметров в диалоговом окне Process Models. Затем установите соответствующий флажок Known.

Можно анализировать следующие графики оценить качество модели:
Сравнение выхода модели и измеренного выхода на графике временной зависимости
Автокорреляция выходных остаточных значений и взаимная корреляция входа и выходных остаточных значений
Вы, должно быть, уже оценили модель, как описано в Оценке Передаточной функции Второго порядка Используя Настройки по умолчанию.
Если вы не выполнили этот шаг, щелкните здесь, чтобы завершить его.
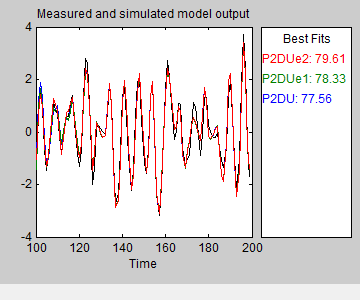
Исследование Выхода Модели. Можно использовать выведенный моделью график проверять, как хорошо модель выводила соответствия измеренный выход в наборе данных валидации. Хорошая модель является самой простой моделью, которая лучше всего описывает динамику и успешно симулирует или предсказывает выход для различных входных параметров.
Чтобы сгенерировать выведенный моделью график, установите флажок Model output в приложении System Identification. Если график пуст, кликните по значку модели в окне приложения System Identification, чтобы отобразить модель на графике.
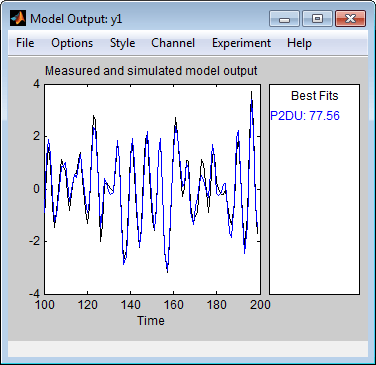
Программное обеспечение System Identification Toolbox™ использует данные о контроле ввода в качестве входа к модели и строит симулированный выход сверху выходных данных о валидации. Предыдущий график показывает, что выход модели соглашается хорошо с выводом данных валидации.
Область Best Fits Выходного графика Модели показывает соглашение (в проценте) между выходом модели и выводом данных валидации.
Вспомните, что данные были симулированы с помощью следующей системы второго порядка с underdamped режимами (комплексные полюса), как описано в Описании Данных, и имеют максимальную чувствительность на уровне 1 рад/с:
Поскольку данные включают шум во вход во время симуляции, предполагаемая модель не может точно воспроизвести модель, используемую, чтобы симулировать данные.
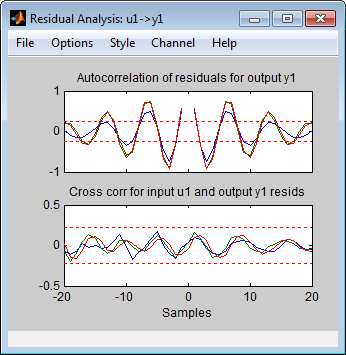
Исследование Остаточных значений Модели. Можно подтвердить модель путем проверки поведения ее остаточных значений.
Чтобы сгенерировать Остаточный График для анализа, установите флажок Model resids в приложении System Identification.
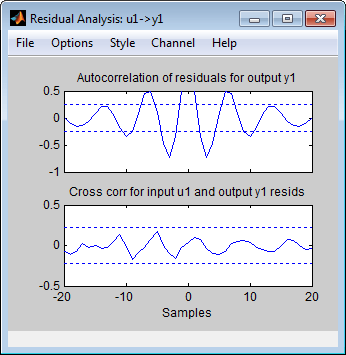
Главные оси показывают автокорреляцию остаточных значений для выхода (тест белизны). Горизонтальный масштаб является количеством задержек, которое является разницей во времени (в выборках) между сигналами, в которых оценивается корреляция. Любые колебания в доверительном интервале считаются незначительными. Хорошая модель должна иметь остаточную автокорреляционную функцию в доверительном интервале, указывая, что остаточные значения являются некоррелироваными. Однако в этом примере, остаточные значения, кажется, коррелируются, который является естественным, потому что шумовая модель используется, чтобы сделать остаточные значения белыми.
Нижние оси показывают взаимную корреляцию остаточных значений с входом. Хорошая модель должна иметь остаточные значения, некоррелированые с прошлыми входными параметрами (тест независимости). Доказательство корреляции указывает, что модель не описывает, как фрагмент выхода относится к соответствующему входу. Например, когда существует пик вне доверительного интервала для задержки k, это означает, что вклад в выход y (t), который происходит из входа u (t-k), правильно не описан моделью. В этом примере нет никакой корреляции между остаточными значениями и входными параметрами.
Таким образом остаточный анализ указывает, что эта модель хороша, но что может быть потребность в шумовой модели.
В этом фрагменте примера вы оцениваете передаточную функцию второго порядка и включаете шумовую модель. Включением шумовой модели вы оптимизируете результаты оценки для приложения предсказания.
Вы, должно быть, уже оценили модель, как описано в Оценке Передаточной функции Второго порядка Используя Настройки по умолчанию.
Если вы не выполнили этот шаг, щелкните здесь, чтобы завершить его.
Оценить передаточную функцию второго порядка с шумом:
Если диалоговое окно Process Models не открыто, выберите Estimate> Process Models в приложении System Identification. Это действие открывает диалоговое окно Process Models.
В области Model Transfer Function задайте следующие опции:
Под Poles выберите 2 и Underdamped. Этот выбор обновляет Передаточную функцию Модели к структуре модели второго порядка, которая может содержать комплексные полюса. Убедитесь, что флажки Zero и Integrator снимаются, чтобы исключить нуль и интегратор (автономный) из модели.
Disturbance Model — Установите на Order 1 оценить шумовую модель H как непрерывное время, модель ARMA первого порядка:
где и D полиномы первого порядка, и e является белым шумом.
Это действие задает Focus как Prediction, который улучшает точность в частотном диапазоне, где уровень шума является низким. Например, если существует больше шума на высоких частотах, алгоритм присваивает меньше важности для точного подбора кривой высокочастотным фрагментам данных.
Имя Отредактируйте имя модели к P2DUe1 сгенерировать модель с уникальным именем в приложении System Identification.
Нажмите Estimate.
В диалоговом окне Process Models, набор Disturbance Model к Order 2 оценить шумовую модель второго порядка.
Отредактируйте поле Name к P2DUe2 сгенерировать модель с уникальным именем в приложении System Identification.
Нажмите Estimate.
В этом фрагменте примера вы оцениваете производительность модели с помощью Выхода Модели и Остаточных Графиков для анализа.
Вы, должно быть, уже оценили модели, как описано в Оценке Передаточной функции Второго порядка Используя Настройки по умолчанию и Оценку Модели процесса Второго порядка с Комплексными полюсами.
Если вы не выполнили эти шаги, щелкните здесь, чтобы завершить их.
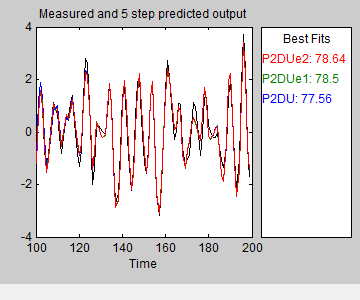
Сравнение Выходных Графиков Модели. Чтобы сгенерировать Выходной график Модели, установите флажок Model output в приложении System Identification. Если график пуст, или выход модели не появляется на графике, кликает по значкам модели в окне приложения System Identification, чтобы отобразить эти модели на графике.
Следующий Выходной график Модели показывает симулированный выход модели по умолчанию. Симулированный отклик моделей является приблизительно тем же самым для моделей с и без шума. Таким образом, включая шумовую модель не влияет на симулированный выход.
Чтобы просмотреть предсказанный вывод модели, выберите Options> 5 step ahead predicted output в Выходном окне графика Модели.
Следующий Выходной график Модели показывает что предсказанный выход модели P2DUe2 (с шумовой моделью второго порядка), лучше, чем предсказанный выход других двух моделей (без шума и с шумовой моделью первого порядка, соответственно).
Сравнение Остаточных Графиков для анализа. Чтобы сгенерировать Остаточный График для анализа, установите флажок Model resids в приложении System Identification. Если график пуст, кликните по значкам модели в окне приложения System Identification, чтобы отобразить эти модели на графике.
P2DUe2 падения хорошо в доверительных границах на Остаточном Графике для анализа.
Просмотреть остаточные значения для P2DUe2 только, удалите модели P2DU и P2DUe1 от Остаточного Графика для анализа путем нажатия на соответствующие значки в приложении System Identification.
![]()
Остаточные обновления Графика для анализа, как показано в следующем рисунке.
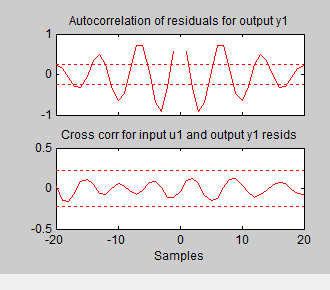
Тест белизны для P2DUe2 показывает, что остаточные значения являются некоррелироваными, и тест независимости не показывает корреляции между остаточными значениями и входными параметрами. Эти тесты указывают на тот P2DUe2 хорошая модель.
Можно просмотреть числовые значения параметров и другую информацию о модели P2DUe2 путем щелчка правой кнопкой по значку модели по приложению System Identification. Диалоговое окно Data/model Info открывается.
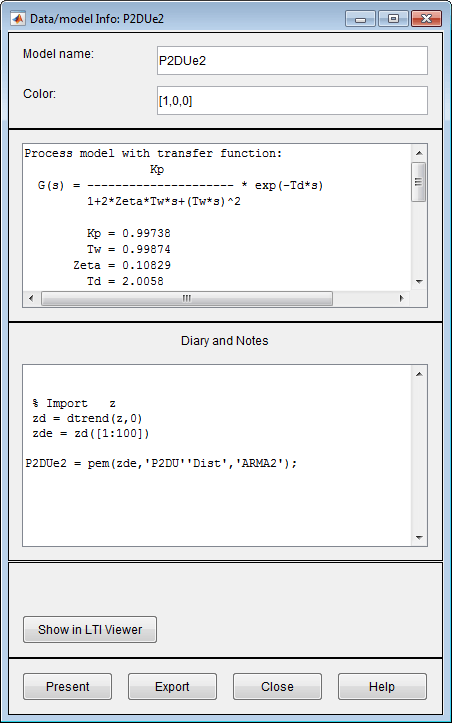
Недоступная для редактирования область диалогового окна перечисляет коэффициенты модели, которые соответствуют следующей структуре модели:
Коэффициенты соглашаются с моделью, используемой, чтобы симулировать данные:
Чтобы просмотреть неопределенность параметра для системной передаточной функции, нажмите Present в диалоговом окне Data/model Info и просмотрите информацию в командном окне MATLAB.
Kp = 0.99821 +/- 0.019982 Tw = 0.99987 +/- 0.0037697 Zeta = 0.10828 +/- 0.0042304 Td = 2.004 +/- 0.0029717
Неопределенность с 1 стандартным отклонением для каждого параметра модели следует за +/- символ.
P2DUe2 также включает аддитивный шумовой термин, где H является моделью ARMA второго порядка, и e является белым шумом:
Программное обеспечение отображает шумовую модель H как отношение двух полиномов, C(s)/D(s), где:
C(s) = s^2 + 2.186 (+/- 0.08467) s + 1.089 (+/- 0.07951) D(s) = s^2 + 0.2561 (+/- 0.09044) s + 0.5969 (+/- 0.3046)
Неопределенность с 1 стандартным отклонением для параметров модели находится в круглых скобках рядом с каждым значением параметров.
Можно выполнить последующий анализ на предполагаемых моделях от рабочего пространства MATLAB. Например, если модель является объектом, который требует контроллера, можно импортировать модель из рабочего пространства MATLAB в продукт Control System Toolbox™. Кроме того, чтобы симулировать вашу модель в программном обеспечении Simulink (возможно, как часть большей динамической системы), можно импортировать эту модель как блок Simulink.
Модели, которые вы создаете в приложении System Identification, не автоматически доступны в рабочем пространстве MATLAB. Чтобы сделать модель доступной для других тулбоксов, Simulink и команд System Identification Toolbox, необходимо экспортировать модель от приложения System Identification до рабочего пространства MATLAB.
Экспортировать P2DUe2 модель, перетащите значок модели к прямоугольнику To Workspace в приложении System Identification. В качестве альтернативы нажмите Export в диалоговом окне Data/model Info. Модель теперь появляется в браузере рабочего пространства MATLAB.
Примечание
Эта модель idproc объект модели.
В этом примере вы создаете простую модель Simulink, которая использует блоки из библиотеки System Identification Toolbox, чтобы принести данным z и модель P2DUe2 в Simulink.
Чтобы выполнить шаги в этом примере, Simulink должен быть установлен на вашем компьютере.
Кроме того, вы, должно быть, уже выполнили следующие шаги:
Загрузите набор данных, как описано в Загрузке Данных в рабочее пространство MATLAB.
Оцените модель процесса второго порядка, как описано в Оценке Модели процесса Второго порядка с Комплексными полюсами.
Экспортируйте модель в рабочее пространство MATLAB, как описано в Экспорте Модели к рабочему пространству MATLAB.
Если вы не выполнили эти шаги, щелкните здесь, чтобы завершить их. Затем перетащите z и P2DUe2 значки к прямоугольнику To Workspace в приложении System Identification. В качестве альтернативы нажмите Export в диалоговом окне Data/model Info. Данные и модель теперь появляются в браузере рабочего пространства MATLAB.
Используйте входной канал набора данных z как введено для симуляции модели, выведенной путем ввода следующего в командном окне MATLAB:
z_input = z; % Creates a new iddata object. z_input.y = []; % Sets the output channel % to empty.
В качестве альтернативы можно задать любой входной сигнал.
Узнать больше. Для получения дополнительной информации о представлении сигналов данных для системы идентификации, смотрите Данные о Представлении в рабочем пространстве MATLAB.
Добавить блоки в модель Simulink:
На вкладке MATLAB Home нажмите![]() Simulink.
Simulink.
В начальной странице Simulink нажмите Blank Model. Затем нажмите Create Model, чтобы открыть новое окно модели.
В окне модели Simulink щелкните![]() , чтобы открыть Браузер Библиотеки. В Браузере Библиотеки выберите библиотеку System Identification Toolbox. Правая сторона отображений окна блокируется характерный для продукта System Identification Toolbox.
, чтобы открыть Браузер Библиотеки. В Браузере Библиотеки выберите библиотеку System Identification Toolbox. Правая сторона отображений окна блокируется характерный для продукта System Identification Toolbox.
Совет
В качестве альтернативы, чтобы получить доступ к библиотеке блоков System Identification, введите slident в командном окне MATLAB.
Перетащите следующие блоки System Identification Toolbox к новому окну модели:
Блок IDDATA Sink
Исходный блок IDDATA
Блок модели IDMODEL
В Браузере Библиотеки Simulink выберите библиотеку Simulink> Sinks и перетащите блок Scope к новому окну модели.
В окне модели Simulink соединитесь, блоки к напоминает следующую фигуру.

Затем вы конфигурируете эти блоки, чтобы получить данные из рабочего пространства MATLAB и установить интервал времени симуляции и длительность.
Эта процедура проводит вас по следующим задачам сконфигурировать блоки модели:
Получение данных из рабочего пространства MATLAB.
Установка интервала времени симуляции и длительности.
В Редакторе Simulink выберите Modeling> Model Settings> Model Settings Ctrl+E.
В диалоговом окне Configuration Parameters, в подпанели Solver, в поле Stop time, 200 типа. Нажмите OK.
Это наборы значений длительность симуляции к 200 секундам.
Дважды кликните Исходный блок Iddata, чтобы открыть Параметры Исходного блока: диалоговое окно Iddata Source. Затем введите следующее имя переменной в поле IDDATA object:
z_input
Эта переменная является объектом данных в рабочем пространстве MATLAB, которое содержит входные данные.

Совет
Как ярлык, можно перетащить мышью имя переменной от браузера рабочего пространства MATLAB до поля IDDATA object.
Нажмите OK.
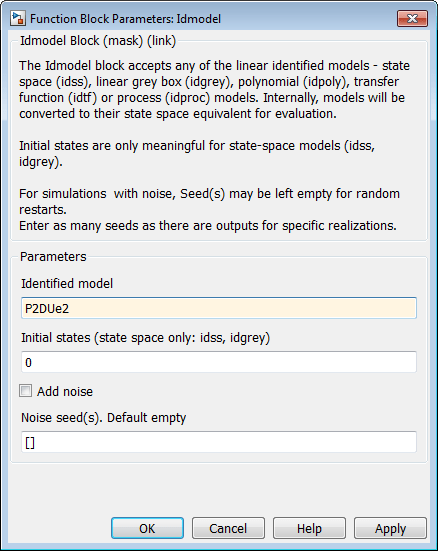
Дважды кликните блок Idmodel, чтобы открыть Параметры Функционального блока: диалоговое окно Idmodel.
Введите следующее имя переменной в поле Model variable:
P2DUe2
Эта переменная представляет имя модели в рабочем пространстве MATLAB.
Снимите флажок Add noise, чтобы исключить шум из симуляции. Нажмите OK.
Когда Add noise выбран, Simulink выводит шумовую амплитуду из NoiseVariance свойство модели и добавляет шум в модель соответственно. Симуляция распространяет этот шум согласно шумовой модели H, которая была оценена с системной динамикой:
Нажмите OK.
Дважды кликните блок Iddata Sink, чтобы открыть Параметры блоков Приемника: диалоговое окно Iddata Sink. Введите следующее имя переменной в поле IDDATA Name:
z_sim_out
Введите 1 в поле Sample Time (sec.), чтобы установить шаг расчета выходных данных совпадать с шагом расчета входных данных.
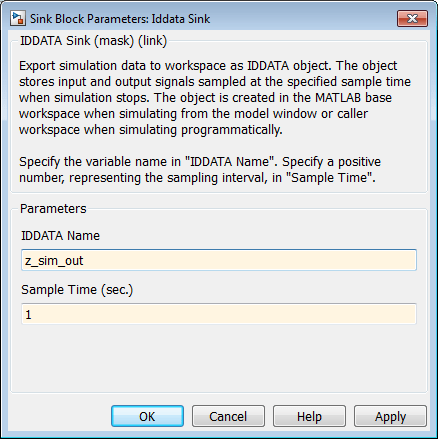
Нажмите OK.
Получившееся изменение в модели Simulink показывают в следующем рисунке.

В Редакторе Simulink выберите Simulation> Run.
Дважды кликните блок Scope, чтобы отобразить график временной зависимости выхода модели.
В браузере рабочего пространства MATLAB заметьте переменную z_sim_out это хранит выход модели как iddata объект. Вы задали это имя переменной, когда вы сконфигурировали блок Iddata Sink.
Эта переменная хранит симулированный выход модели, и это теперь доступно для последующей обработки и исследования.
