Преобразуйте закодированное изображение шаблона Байера в изображение истинного цвета
RGB = demosaic(I,sensorAlignment)I, к изображению истинного цвета, RGB, использование откорректированной градиентом линейной интерполяции. sensorAlignment задает шаблон Байера.
Мозаика фильтра Байера или массив цветового фильтра, относится к расположению цветовых фильтров, которые позволяют каждому датчику в цифровом фотоаппарате одно датчика записать только красные, зеленые, или синие данные. Шаблоны подчеркивают количество зеленых датчиков, чтобы подражать большей чувствительности человеческого глаза к зеленому свету. demosaic функционируйте интерполяция использования, чтобы преобразовать двумерное закодированное Байером изображение в изображение истинного цвета.
Преобразуйте закодированное изображение шаблона Байера, которое было сфотографировано камерой с выравниванием датчика 'bggr' .
I = imread('mandi.tif'); J = demosaic(I,'bggr'); imshow(I);

figure, imshow(J);

I — Шаблон Байера закодировал изображениеШаблон Байера закодировал изображение в виде M-by-N массив значений интенсивности. I должен иметь по крайней мере 5 строк и 5 столбцов.
Типы данных: uint8 | uint16 | uint32
sensorAlignment — Шаблон Байера'gbrg' | 'grbg' | 'bggr' | 'rggb'Шаблон Байера в виде одного из значений в следующей таблице. Каждое значение представляет порядок красных, зеленых, и синих датчиков путем описания четырех пикселей в верхнем левом углу изображения (слева направо, от начала до конца).
| Шаблон | Выравнивание датчика 2 на 2 |
|---|---|
'gbrg' | 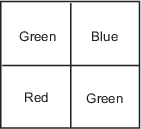 |
'grbg' | 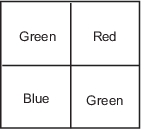 |
'bggr' | 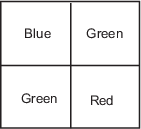 |
'rggb' | 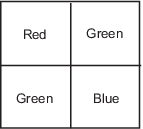 |
Типы данных: char | string
[1] Malvar, H.S. L. Он и R. Ножовщик, Высококачественная линейная интерполяция для demosaicing цветных изображений с рисунком Байера. ICASPP, Объем 34, Выпуск 11, стр 2274-2282, май 2004.
