Lidar Toolbox™ использует эти системы координат:
Word Фиксированная, универсальная система координат, в которой существуют физические датчики.
Датчик — Характерный для каждого конкретного датчика, такого как датчик лидара или камера.
Пространственный — Характерный для изображения получен камерой. Местоположения в пространственных координатах описываются в пикселях.
Шаблон — система координат шаблона шахматной доски, обычно используемая, чтобы калибровать датчики камеры.
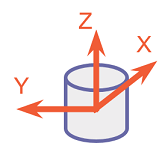
Система мировой координаты является фиксированной универсальной системой, которая работает абсолютной ссылкой для всех датчиков. Lidar Toolbox использует предназначенную для правой руки Декартову систему мировой координаты, заданную в ISO 8855, где положительный z - ось подчеркивает от земли. Модули исчисляются в метрах.
Система координат датчика в Lidar Toolbox привязывается на определенном датчике, таком как датчик лидара или камера. Местоположение каждого датчика содержит источник своей системы координат. Например, оптический центр камеры обычно действует как источник системы координат камеры. Точки в системе координат датчика следуют этим соглашениям осей:
x - ось указывает вперед от датчика.
y - ось указывает налево, как просматривается при направлении вперед.
z - ось подчеркивает от земли, чтобы обеспечить правую систему координат.
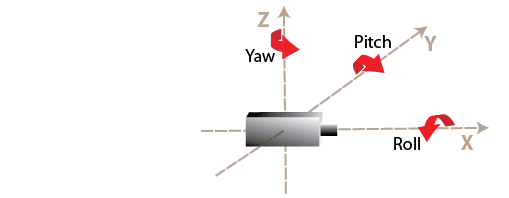
Рыскание, тангаж и углы вращения датчиков следуют соглашению ISO. Эти углы по часовой стрелке положительны при взгляде в положительном направлении z - y - и x - оси, соответственно.
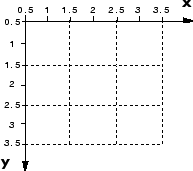
Пространственные координаты позволяют вам задать местоположение в изображении с большей гранулярностью, чем пиксельные координаты. В пиксельной системе координат каждый пиксель обработан как дискретный модуль, однозначно определенный целочисленной парой строки и столбца, такой как (3,4). В системе пространственной координаты местоположения в изображении представлены в терминах частичных пикселей, такой как (3.3 4.7).
 Для получения дополнительной информации о системе пространственной координаты смотрите Пространственные координаты.
Для получения дополнительной информации о системе пространственной координаты смотрите Пространственные координаты.
Общий метод для оценки параметров монокулярного датчика камеры должен калибровать камеру с помощью повторных изображений калибровочного шаблона, таких как шахматная доска. В системе координат шаблона, (X P, Y P), P-ось X указывает направо и точки P-оси Y вниз. Источник шахматной доски является нижним правым углом верхнего левого квадрата шахматной доски.
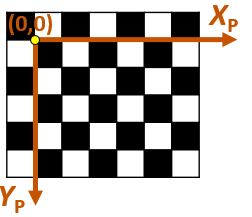
Каждый угол средства проверки представляет одну точку в системе координат. Например, угол справа от источника (1,0), и угол ниже источника (0,1). Для получения дополнительной информации о калибровке камеры при помощи шаблона шахматной доски смотрите, Калибруют Монокулярную Камеру (Automated Driving Toolbox).
