Можно задать местоположения в изображениях с помощью различных систем координат. Системы координат используются, чтобы поместить элементы друг относительно друга. Координаты в пикселе и системах пространственной координаты относятся к местоположениям в изображении. Координаты в 3-D системах координат описывают 3-D расположение и источник системы.
Пиксельные координаты позволяют вам задать местоположения в изображениях. В пиксельной системе координат изображение обработано как сетка дискретных элементов, упорядоченных сверху донизу и слева направо.
![]()
Для пиксельных координат, количества строк, r, вниз, в то время как количество столбцов, c, увеличения направо. Пиксельные координаты являются целочисленными значениями и диапазоном от 1 до длины строки или столбца. Пиксельные координаты, используемые в программном обеспечении Computer Vision Toolbox™, на основе одни, сопоставимы с пиксельными координатами, используемыми Image Processing Toolbox™ и MATLAB®. Для получения дополнительной информации о пиксельной системе координат смотрите Пиксельные индексы.
Пространственные координаты позволяют вам задать местоположение в изображении с большей гранулярностью, чем пиксельные координаты. Такой как, в пиксельной системе координат, пиксель обработан как дискретный модуль, однозначно определенный целочисленной парой строки и столбца, такой как (3,4). В системе пространственной координаты местоположения в изображении представлены в терминах частичных пикселей, такой как (3.3, 4.7).
Для получения дополнительной информации о системе пространственной координаты смотрите Пространственные координаты.
Когда вы восстанавливаете 3-D сцену, можно задать получившиеся 3-D точки в одной из двух систем координат. В основанной на камере системе координат точки заданы относительно центра камеры. В калибровке основанная на шаблоне система координат точки заданы относительно точки в сцене.
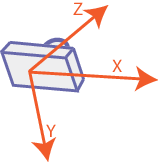
Функции Computer Vision Toolbox используют предназначенную для правой руки систему мировой координаты. В этой системе x - ось указывает направо, y - точки оси вниз и z - точки оси далеко от камеры. Чтобы отобразить 3-D точки, использовать pcshow.
Точки, представленные в основанной на камере системе координат, описаны с источником, расположенным в оптическом центре камеры.
В системе стерео источник расположен в оптическом центре Камеры 1.
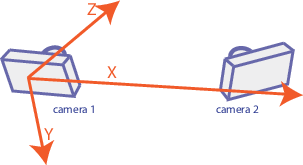
Когда вы восстанавливаете 3-D сцену с помощью калиброванного стереофотоаппарата, reconstructScene и triangulate функции возвращают 3-D точки с источником в оптическом центре Камеры 1. Когда вы используете изображения Kinect®, pcfromkinect функция возвращает 3-D точки с источником в центре камеры RGB.
Точки, представленные в калибровке основанная на шаблоне система координат, описаны с источником, расположенным в (0,0) местоположение калибровочного шаблона.
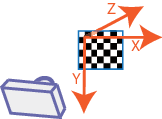
Когда вы восстанавливаете 3-D сцену из нескольких представлений, содержащих калибровочный шаблон, получившиеся 3-D точки заданы в основанной на шаблоне системе координат. Структура От Движения Из Двух примеров Представлений показывает, как восстановить 3-D сцену из пары 2D изображений, содержащих шаблон шахматной доски.
