Вычислите электрическое положение и механическую скорость ротора
Motor Control Blockset / Средства оценки Sensorless
Блок Sliding Mode Observer вычисляет электрическое положение и механическую скорость PMSM при помощи на модульное напряжение и текущие значения вдоль α- и β - оси стационарной системы координат αβ.
Эти уравнения описывают расчет электрического положения и механической скорости блоком.
Эти уравнения описывают операцию наблюдателя скользящего режима дискретного времени при помощи на стоимости единицы:
где:
коэффициент противо-ЭДС статора и текущий для α оси.
коэффициент противо-ЭДС статора и текущий для β оси.
напряжения питания статора.
сопротивление статора.
индуктивность статора.
потокосцепление из-за постоянного магнита.
электрическая скорость вращения.
электрическое положение ротора.
время.
период выборки.
демонстрационное количество.
номинальное напряжение, соответствующее 1 на модуль.
номинальное текущее соответствие 1 на модуль.
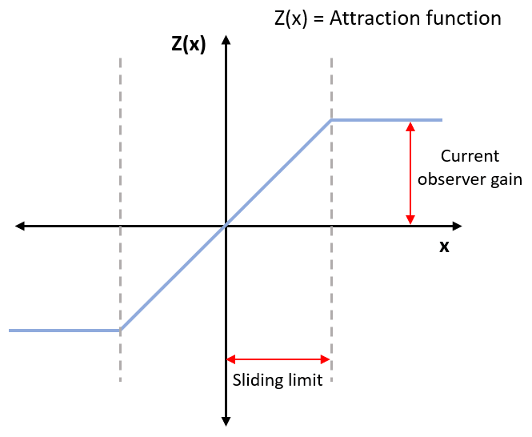
функция привлекательности.
частота среза фильтра в циклах на выборку.
частота среза в циклах в секунду.
демонстрационная частота в выборках в секунду.
предполагаемый коэффициент противо-ЭДС.
Используйте Current observer gain и параметры Sliding surface limit, чтобы настроить блок.
Чтобы улучшить устойчивость, увеличьте Sliding surface limit или уменьшайте Current observer gain.
Чтобы уменьшать искажение, уменьшите Current observer gain или увеличьте Sliding surface limit.
[1] И. Кун, Н. В. Куинх, Ц. Хуан и Л. Хуан, "Проектирование и симуляция адаптивной регулировки скорости для основанного на SMO sensorless PMSM диск", 2 012 4-х Международных конференций по вопросам Интеллектуальных и Усовершенствованных Систем (ICIAS2012), Куала-Лумпур, 2012, стр 439-444 (doi: 10.1109/ICIAS.2012.6306234)
[2] Чжан Янь и В. Уткин, "Наблюдатели скользящего режима для электрических машин - обзор", IEEE 2002 28-я Ежегодная конференция Общества Industrial Electronics. IECON 02, Севилья, 2002, стр 1842-1847 vol.3. (doi: 10.1109/IECON.2002.1185251)
[3] Т. Бернардес, В. Ф. Монтэгнер, Х. А. Грюндлинг и Х. Пинейро, "Наблюдатель Скользящего режима Дискретного времени для Векторного Управления Sensorless Постоянного магнита Синхронная Машина", в Транзакциях IEEE на Industrial Electronics, издании 61, № 4, стр 1679-1691, апрель 2014 (doi: 10.1109/TIE.2013.2267700)
[4] Цз. Го и С. К. Пэнда, "Проект наблюдателя скользящего режима для sensorless управления SPMSM, действующего на средних скоростях и высоких скоростях", 2 015 Симпозиумов IEEE по Управлению Sensorless для Электрических Дисков (SLED), Сидней, Новый Южный Уэльс, 2015, стр 1-6. (doi: 10.1109/SLED.2015.7339255)
Clarke Transform | Discrete PI Controller with anti-windup and reset | Flux Observer | Inverse Park Transform | Sine-Cosine Lookup

