Вязкая гидромуфта между вращающимися валами автомобильной трансмиссии
Simscape / Автомобильная трансмиссия / Couplings & Drives

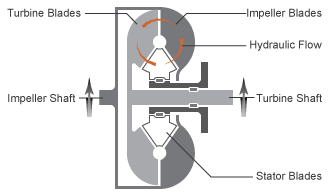
Блок Torque Converter моделирует гидротрансформатор. Блок Torque Converter имеет два порта сохранения вращательного механического устройства, которые сопоставлены с рабочим колесом и турбиной, соответственно. Крутящий момент поблочных передач и скорость вращения между портом I рабочего колеса и турбинным портом T путем действия как интерполяционная таблица. Блок может симулировать диск (потоки энергии от порта I до порта T) и побережье (потоки энергии от порта T до порта I) режимы.
Когда Coast mode modeling установлен в Continuous:
Вал рабочего колеса должен всегда вращаться в положительном направлении. Симуляция не допустима для < 0.
Если вы управляете блоком Torque Converter при помощи источника крутящего момента, такого как блок Generic Engine, необходимо включать инерцию в источник, чтобы представлять механизм, инерцию вала или другие исходные компоненты. Чтобы гарантировать, что рабочее колесо запускается путем вращения в положительном направлении, устанавливает начальную скорость для этой инерции к положительному значению.
I — Рабочее колесоПорт сохранения вращательного механического устройства сопоставлен с рабочим колесом.
T — ТурбинаПорт сохранения вращательного механического устройства сопоставлен с турбиной.
Coast mode modeling — Моделирование типа гидротрансформатораTwo-mode (значение по умолчанию) | ContinuousМоделирование типа гидротрансформатора, заданного как любой Two-mode или Continuous. Continuous моделирование типа поддерживает и диск и режимы побережья, но уменьшало точность и робастность при моделировании около перехода между каботажным судоходством и ведущими режимами. Поэтому, если симуляция включает режим побережья, используйте Two-mode моделирование типа из-за его лучшей робастности и точности при моделировании режима побережья.
Drive mode speed ratio vector — Турбинная скорость к отношениям скорости рабочего колесаОтношения скорости, , из режима диска. Векторные элементы должны в порядке возрастания запускаться в 0 и заканчиваться в 1.
Чтобы включить этот параметр, установите Coast mode modeling на Two-mode.
Drive mode torque ratio vector — Турбинный крутящий момент к рабочему колесу закручивает отношенияЗакрутите отношения, , из режима диска. Каждый элемент вектора должен быть больше или быть равен 1, и последний элемент должен быть 1.
Чтобы включить этот параметр, установите Coast mode modeling на Two-mode.
Drive mode capacity factor vector — Коэффициенты нагрузки режима дискаm*N/rpm^2 (значение по умолчанию) | векторКоэффициенты нагрузки,, из режима диска. Каждый элемент вектора должен быть неотрицательным, и последний элемент должен быть 0.
Чтобы включить этот параметр, установите Coast mode modeling на Two-mode.
Coast mode speed ratio vector — Скорость рабочего колеса к турбинным отношениям скоростиОтношения скорости, , из режима побережья. Векторные элементы должны в порядке возрастания запускаться в 0 и заканчиваться в 1.
Чтобы включить этот параметр, установите Coast mode modeling на Two-mode.
Coast mode capacity factor vector — Коэффициенты нагрузки режима побережьяm*N/rpm^2 (значение по умолчанию) | векторКоэффициенты нагрузки, , из режима побережья. Каждый элемент вектора должен быть неотрицательным, и последний элемент должен быть 0.
Чтобы включить этот параметр, установите Coast mode modeling на Two-mode.
Interpolation method — Метод интерполяции функции поискаLinear (значение по умолчанию) | SmoothМетод интерполяции поиска функционирует в виде любого Linear или Smooth. Метод интерполирует отношение крутящего момента и функции коэффициента нагрузки между дискретными относительными скоростными значениями в области определения. Для получения дополнительной информации о Linear и Smooth, смотрите tablelookup.
Extrapolation method — Метод экстраполяции функции поискаLinear (значение по умолчанию) | Nearest | ErrorМетод экстраполяции поиска функционирует в виде Linear, Smooth, или Error. Метод экстраполирует отношение крутящего момента и функции коэффициента нагрузки. Для получения дополнительной информации о Linear, Smooth, и Error, смотрите tablelookup.
Initial mode — Начальный режим симуляцииDrive mode (значение по умолчанию) | Coast modeНачальный режим симуляции в виде любого Drive mode или Coast mode.
Mode transition threshold — Порог перехода режимаrpm (значение по умолчанию) | положительная скалярная величинаПорог перехода режима симуляции. Устанавливание порога для перехода режима может увеличить сходимость моделирования путем предотвращения высокочастотного переключения режимов.
Чтобы включить этот параметр, установите Coast mode modeling на Two-mode.
Speed ratio vector — Турбинная скорость к отношениям скорости рабочего колесаОтношения скорости, , из гидротрансформатора. Каждый элемент вектора должен быть в порядке возрастания и в области значений [0,1].
Чтобы включить этот параметр, установите Coast mode modeling на Continuous.
Torque ratio vector — Турбинный крутящий момент к рабочему колесу закручивает отношенияЗакрутите отношения, , из гидротрансформатора. Каждый элемент вектора должен быть положительным.
Чтобы включить этот параметр, установите Coast mode modeling на Continuous.
Capacity factor parameterization — Определение коэффициента нагрузкиRatio of speed to square root of impeller torque (значение по умолчанию) | Ratio of impeller torque to square of speedОпределение коэффициента нагрузки конвертера, заданного как любой Ratio of speed to square root of impeller torque или Ratio of impeller torque to square of speed. Установка этого параметра влияет на Capacity factor vector.
Для Ratio of speed to square root of impeller torque параметр:
Для Ratio of impeller torque to square of speed параметр:
Чтобы включить этот параметр, установите Coast mode modeling на Continuous.
Capacity factor reference speed — Выбор скорости для определения коэффициента нагрузкиAlways impeller speed (значение по умолчанию) | Turbine speed for speed ratios greater than oneВыбор скорости для определения коэффициента нагрузки в виде любого Always impeller speed или Turbine speed for speed ratios greater than one.
Always impeller speed: Используйте скорость рабочего колеса для всех значений .
Turbine speed for speed ratios greater than one: Используйте скорость рабочего колеса для всех значений <1, и турбинная скорость использования когда > 1.
Чтобы включить этот параметр, установите Coast mode modeling на Continuous.
Capacity factor vector — Коэффициенты нагрузки(rad/s)/(N*m)^0.5 (значение по умолчанию) | векторКоэффициенты нагрузки конвертера. Можно задать коэффициент нагрузки как:
Коэффициент нагрузки
|
| Установите параметр Capacity factor parameterization на Ratio of speed to square root of impeller torque. |
|
| Установите параметр Capacity factor parameterization на Ratio of impeller torque to the square of the speed. Значением по умолчанию является 1e-3 * [6.616, 6.048, 5.787, 5.384, 4.681, 3.779, 2.671, 2.047, 1.111.4] N*m/(rad/s)^2. |
Примечание
Если вы не задаете данные о коэффициенте нагрузки для отношения скорости 1, блок использует значение коэффициента нагрузки 10*KMax, где K Max является максимальным значением в заданном векторе коэффициента нагрузки. Соответствующее отношение крутящего момента принято, чтобы быть 0. Для всех других значений отношения скорости, не явным образом заданных в данных об интерполяционной таблице, блок использует метод интерполяции или экстраполяции, выбранный в диалоговом окне блока.
Чтобы включить этот параметр, установите Coast mode modeling на Continuous.
Чтобы включить Dynamics, установите параметр Coast mode modeling на Continuous.
Model transmission lag — Установка задержки передачиNo lag – Suitable for HIL simulation (значение по умолчанию) | Specify time constant and initial value Установка задержки передачи в виде любого No lag – Suitable for HIL simulation или Specify time constant and initial value.
No lag – Suitable for HIL simulation: Передача крутящего момента мгновенна.
Когда нет никакой задержки, входного крутящего момента рабочего колеса, , и выходной турбинный крутящий момент, :
Specify time constant and initial value: Крутящий момент передается с задержкой. Если вы выбираете эту опцию, можно задать параметры Initial turbine-to-impeller torque ratio и Torque transmission time constant.
Примечание
Для оптимальной эффективности симуляции выберите No lag - Suitable for HIL simulation.
Torque transmission time constant — Постоянная времени передачи крутящего моментаs (значение по умолчанию) | положительная скалярная величинаЗакрутите время передачи. Задержка увеличивает точность модели, но уменьшает эффективность симуляции. Смотрите Настраивают Точность Модели для получения дополнительной информации.
Чтобы включить этот параметр, установите Model transmission lag на Specify time constant and initial value.
Initial turbine-to-impeller torque ratio — Начальное отношение крутящего момента турбины к рабочему колесуНачальное отношение крутящего момента турбины к рабочему колесу.
Можно опционально включать эффект задержки передачи крутящего момента, которая вызывается внутренним потоком жидкости и сжимаемостью. Вместо и будучи мгновенно ограниченным друг другу, задержка первого порядка вводит отсроченную реакцию в крутящем моменте рабочего колеса:
Предыдущая мгновенная функция коэффициента нагрузки K определяет установившееся значение τ I.
Чтобы включить этот параметр, установите Model transmission lag на Specify time constant and initial value.
[1] Ассоциация инженеров автомобилестроения, гидродинамический тестовый код диска (поверхностные методические рекомендации транспортного средства), SAE J643, декабрь 2018.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.



