В этом примере показано, как смоделировать привод двойного действия с Simscape™ Multibody™ и Simscape. Simscape Multibody моделирует механическую систему цилиндра и модели Simscape гидравлическая система. Можно использовать блок Translational Multibody Interface, чтобы соединить эти две системы.
Схематика показывает цилиндр в трех настройках: полуотрекшийся, в убранном положении, и полностью расширенный.
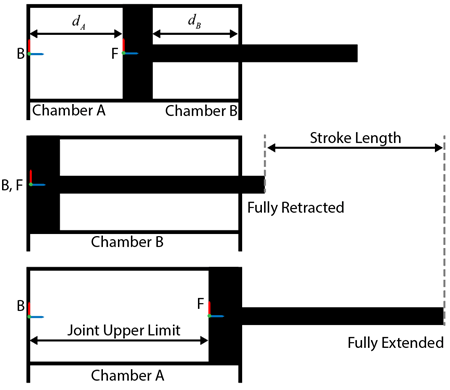
Можно смоделировать механическую деталь системы в Simscape Multibody. Например, чтобы смоделировать цилиндр и поршень, можно использовать Revolved Solid (Simscape Multibody) и Cylindrical Solid (Simscape Multibody) блоки. Чтобы обеспечить поступательную степень свободы для поршня, используйте блок Prismatic Joint (Simscape Multibody). Чтобы легко вычислить длины емкостей A и B, можно присоединить базовую систему координат (B) и система координат последователя (F) соединения к центрам левой внутренней поверхности емкости A и левой поверхности поршня, соответственно. Убедитесь, что Z - оси B и систем координат F выравниваются и обе точки к емкости B.
Используя это соглашение, длину емкости A, , положение выход блока соединений и длина емкости B, , равняется различию длины хода и . Чтобы гарантировать, что поршень не перемещается вне концов цилиндра, можно задать верхние и более низкие пределы положения блока Prismatic Joint.
Примечание
Необходимо создать пользовательские системы координат прежде, чем присоединить объединенные системы координат в желаемых местоположениях. Смотрите Пользовательские Твердые Системы координат (Simscape Multibody) для получения дополнительной информации.
Этот рисунок показывает блок-схему модели гидроцилиндра двойного действия, описанной выше. Пример использует два блока Translational Mechanical Converter (IL), чтобы смоделировать емкости A и B цилиндра. Блок Translational Multibody Interface соединяет блоки Translational Mechanical Converter (IL) с Призматическим Блоком соединений. Смотрите Соединяющиеся Сети Simscape к Соединениям Simscape Multibody для деталей того, как использовать блок Translational Multibody Interface.
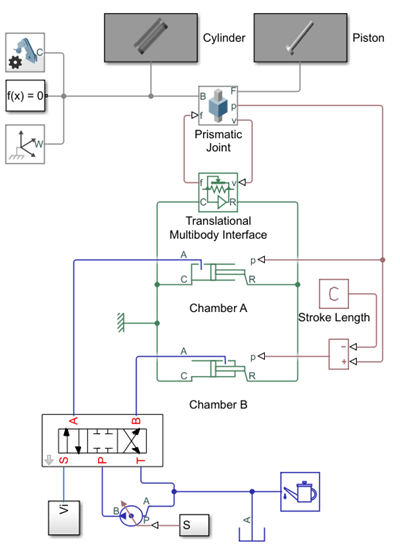
В емкости A, давление в порте A перемещает поршень от 0 до длины хода. Смещение поршня равняется положению выходу блока Prismatic Joint. К емкости модели A:
Соедините порты C и R блока Translational Multibody Interface к портам C и R верхнего блока Translational Mechanical Converter (IL), соответственно.
В блоке Translational Mechanical Converter (IL), набор Interface displacement к Provide input signal from Multibody joint включить порт p.
Соедините порты p Призматического блока Блок соединений и Translational Mechanical Converter (IL).
В емкости B, давление в порте A перемещает поршень от 0 до отрицательной длины хода. Поэтому необходимо изменить ориентацию по умолчанию и добавить смещение к входному сигналу положения более низкого блока Translational Mechanical Converter (IL). Смещение равняется -.
В более низком блоке Translational Mechanical Converter (IL), набор Mechanical orientation к Pressure at A causes negative displacement of R relative to C.
Установите Interface displacement на Provide input signal from Multibody joint включить порт p.
Добавьте блок PS Constant и задайте константу как длину хода цилиндра.
Добавьте блок PS Subtract, затем соедините его с PS Constant и блоками Prismatic Joint как показано в схеме. Обратите внимание на то, что выход блока PS Subtract равняется -.
Ограничить перемещение поршня:
В Призматическом Блоке соединений, под разделом Limits, выбирают параметры Specify Upper Limit и Specify Lower Limit.
Под разделом Specify Lower Limit параметр Bound указывает на минимальное расстояние между системами координат B и F блока соединений. В этом примере задайте параметр Bound как 0 м.
Под Specify Upper Limit параметр Bound указывает на максимальное расстояние между системами координат B и F Призматического Блока соединений. В этом примере задайте параметр Bound как длину хода цилиндра.
Системы гидроцилиндра двойного действия могут использоваться во многих приложениях. Например, трейлер дампа может использовать гидроцилиндр двойного действия, чтобы привести в движение разрезать ножницами механизм подъема, который повышает и понижает кровать дампа. Смотрите Гидравлический Интерфейс - Трейлер Дампа с Гидравлическим Цилиндром (Simscape Multibody) для получения дополнительной информации. Под маской Блока Гидроцилиндра Двойного Действия в разрезать ножницами подъеме механические и гидравлические подсистемы, которые соединяются блоком Translational Multibody Interface. Призматический Блок соединений в механической подсистеме предоставляет информацию о положении этим двум приводам в гидравлической подсистеме, Главной Емкости Емкости и Нижней части, которые имеют противоположные настройки параметра Mechanical orientation. Блок C Constant обеспечивает смещение сигнала положения к Главному приводу Емкости, потому что, когда Нижняя Емкость в мертвом объеме (где положение p = 0), Главная Емкость в максимальном диапазоне.
Rotational Multibody Interface | Translational Multibody Interface
