В качестве ядра в системе мультител является набор тел, соединенных через соединения и связанных кинематическими ограничениями, такими как передачи. Силы и крутящие моменты различных типов позволяют вам привести в движение различные тела, в то время как датчики позволяют вам обнаружить получившееся движение. В программном обеспечении Simscape™ Multibody™ вы используете блоки, чтобы непосредственно представить эти компоненты.
Рассмотрим Simscape Multibody на известном примере четырёхзвенника. Можно открыть эту модель в командной строке MATLAB® путем ввода sm_four_bar. Модель состоит из подсистем твердых тел, соединенных через Блоки соединений. Блоки соединений задают степени свободы, доступные телам. Подсистемы тела задают, через базовую блок-схему, твердые свойства тела.
Основные Компоненты sm_four_bar Модели
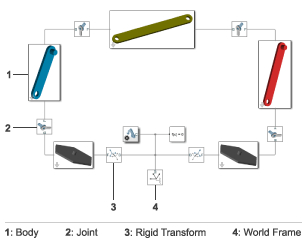
Подсистемы тела в свою очередь состоят из блоков Extruded Solid, соединенных через блоки Rigid Transform. Вытесненные Твердые блоки обеспечивают твердые свойства, включая геометрию, инерцию, цвет и системы координат — тройки осей, которые кодируют всю информацию о положении и ориентации в модели. Твердые блоки Преобразования вращают и перемещают твердые тела, чтобы гарантировать соответствие сборки тел.
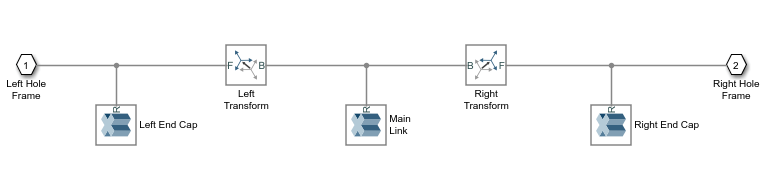
Рисунок показывает базовую блок-схему для двухкомпонентной подсистемы тела со звеньями. Эта схема включает три блока Solid, представляя центральное и периферийные части двухкомпонентного звена. Два блока Твердого Преобразования смещают периферийные твердые тела в свои соответствующие положения около концов центрального тела.
Компоненты подсистемы тела
World Frame — Добавляет инерционная система координат к модели.
Mechanism Configuration — Задает ускорение свободного падения в модели.
Настройка решателя - Устанавливает локальные опции решателя Simscape, такие как типы, допуски и временные шаги. Это - единственный необходимый блок в модели.
Можно привести в движение модель, прикладывая силу или крутящий момент к телу или к соединению. Чтобы представлять силы и крутящие моменты, действующие на тело, Simscape Multibody использует библиотеку Forces и Torques. Добавьте блок из этой библиотеки и соедините ее с системой (системами) координат тела, к которой вы хотите прикладывать силу или крутящий момент.
| Блок | Функция |
|---|---|
| External Force and Torque | Общая сила и/или крутящий момент, происходящий за пределами модели мультитела |
| Internal Force | Общая пара силы между двумя произвольными системами координат |
| Spring and Damper Force | Пара силы демпфера Spring между двумя произвольными системами координат |
| Inverse Square Law Force | Пара силы с обратной зависимостью от квадратного расстояния между двумя произвольными системами координат (e.g., кулоновы электростатические силы) |
| Gravitational Field | Гравитация массы точки на всех телах в зависимости от их расстояний до самой массы точки |
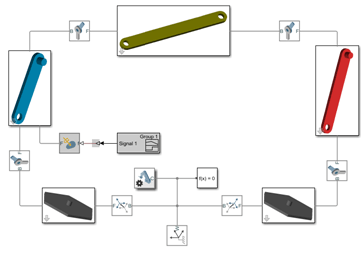
На изображении показана модель с четырьмя звеньями и с блоком External Force и Torque для задания силы и крутящего момента на кривошипно-шатунной раме.
Чтобы задать силу или крутящий момент, действующий в соединении, Simscape Multibody обеспечивает выбор входных параметров приведения в действие непосредственно в блоках соединений. Каждый примитив соединения - основной компонент блока соединений - обеспечивает выбор приведения в действие характерный для этого примитива.
Входные параметры могут иметь два типа:
Движение — Задает изменяющуюся во времени траекторию данного объединенного примитива.
Обеспечьте или закрутите — Задают изменяющуюся во времени силу приводов или крутящий момент, действующий в данном объединенном примитиве.
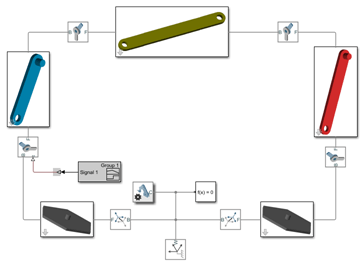
Рисунок показывает модель четырёхзвенника с крутящим моментом приведения в действие, действующим на шарнирное соединение.
Можно обнаружить различные динамические переменные между парами системы координат, e.g., для анализа или системы управления. Обнаружение выходных параметров может иметь два типа:
Движение — Вычисляет и вывело относительное положение, скорость или ускорение между двумя системами координат Simscape Multibody. Можно обнаружить движение между объединенными системами координат, при помощи распознающейся возможности блоков соединений, или между произвольными системами координат, при помощи блока Transform Sensor.
Обеспечьте или закрутите — Вычисляют и выводят силы и крутящие моменты, действующие между двумя системами координат Simscape Multibody. Можно обнаружить силу и крутящий момент между системами координат порта определенных Сил и блоков Крутящих моментов, таких как блок Inverse Square Law Force, или между системами координат порта блока соединений.
Блоки соединений позволяют вам обнаружить различные типы сил и крутящих моментов между их системами координат соответствующего порта, включая:
Сила приводов или крутящий момент, действующий в данном объединенном примитиве.
Ограничительная сила и крутящий момент, действующий всего соединения, чтобы предотвратить движение, нормальное к объединенным степеням свободы.
Общая сила и крутящий момент, включая ограничение и соединяют примитивные вклады приведения в действие, действуя всего соединения.
Рисунок показывает модель четырёхзвенника с блоком Transform Sensor для координаты траектории, распознающейся между системой координат ссылки разветвителя и мировой системой координат.
![]()
