Геометрия облака точек для моделирования контакта
Simscape / Мультитело / Кривые и Поверхности

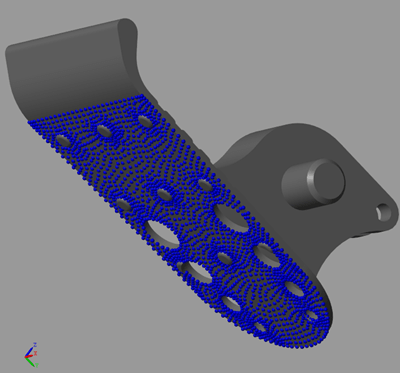
Блок Point Cloud экспортирует набор точек на пробеле для моделирования проблем контакта. Каждая точка имеет твердое смещение относительно системы координат блока Point Cloud. Можно использовать блок Point Cloud, чтобы аппроксимировать геометрию, такую как твердая или выпуклая оболочка. То, когда моделирование выдержало и распределенные проблемы контакта, блок Spacial Contact Force выполняет лучше с блоком Point Cloud, чем с геометрией, блокируется, такие как Brick Solid и File Solid. Это изображение демонстрирует, как использовать облако точек, чтобы аппроксимировать нижнюю часть ноги робота.
Блок Point Cloud имеет один порт системы координат (R) и один порт геометрии (G). Использовать блок Point Cloud для проблем контакта модели, порт connect G с блоком Spatial Contact Force. Блок Spatial Contact Force обрабатывает облако точек как агрегацию N - конфигурации точки и применяет силы контакта к каждой точке независимо. Каждая сила контакта основана на проникновении и скорости отдельной точки облака. Обратите внимание на то, что блок Spatial Contact Force не поддерживает обнаружение, когда соединено с блоком Point Cloud.
Чтобы задать местоположения точек, можно ввести N-by-3 матрица для параметра Coordinates Matrix блока Point Cloud. Каждая строка матрицы задает Декартовы координаты точки относительно системы координат блока Point Cloud. Ошибка происходит, если матрица имеет какие-либо повторные строки.
Совет
Можно использовать unique функция, чтобы удалить повторенные строки из входной матрицы.
