Однофазная асинхронная машина прямое управление крутящим моментом
Simscape / Электрический / Управление / Управление Асинхронной машиной
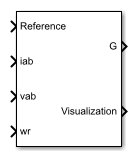
Блок Induction Machine Direct Torque Control (Single-Phase) реализует однофазную асинхронную машину прямая структура управления крутящего момента.
Эта схема показывает прямую архитектуру управления крутящего момента для однофазных машин
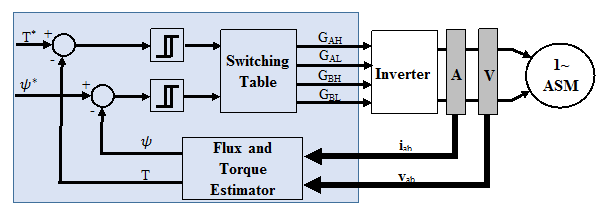
Оценка крутящего момента и потока основана на уравнениях напряжения машины. Уравнения напряжения дискретного времени с помощью обратного Эйлерового метода дискретизации:
где:
Ras и Rbs являются основным сопротивлением обмотки и вспомогательным сопротивлением обмотки, соответственно.
ia и ib являются основной текущей обмоткой и вспомогательной текущей обмоткой, соответственно.
va и vb являются основным и вспомогательным извилистым напряжением, соответственно.
ψa и ψb являются основным и вспомогательным извилистым потоком, соответственно.
Крутящий момент и поток получены из:
где:
p количество пар полюса.
a вспомогательный глагол к основному отношению поворота обмоток.
Использование простых гистерезисных компараторов обнаруживает состояние ошибок крутящего момента и потока. Следующие фигуры иллюстрируют гистерезисные компараторы и переключающиеся секторы.
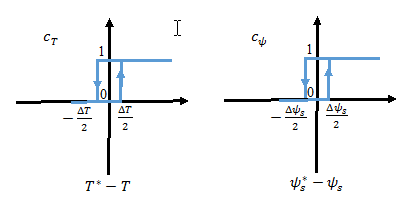
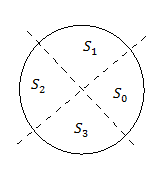
Таблица показывает оптимальную таблицу переключения (инвертор высокая сторона).
| cψ, cT, S(θ) | S0 | S1 | S2 | S3 | |
|---|---|---|---|---|---|
cψ = 1 | cT = 1 | 1, 1 | 0, 1 | 0, 0 | 1, 0 |
cT = 0 | 1, 0 | 1, 1 | 0, 1 | 0, 0 | |
cψ = 0 | cT = 1 | 0, 1 | 0, 0 | 1, 0 | 1, 1 |
cT = 0 | 0, 0 | 1, 0 | 1, 1 | 0, 1 | |
Ссылка крутящего момента может быть обеспечена как вход, или, в случае регулировки скорости, сгенерирована внутренне использование контроллера скорости PI.
Ссылка потока сгенерирована внутренне с помощью:
где,
ωr является ротором угловая механическая скорость в rad/s.
fn является расчетной частотой.
ψn является расчетным потоком.
Потери времени инвертора степени не рассматриваются в этом блоке. Для аппаратной реализации добавьте потерю времени внешне.
[1] Takahashi, я., и Т. Ногучи. "Новая Стратегия управления Быстрого Ответа и Высокой эффективности Асинхронного двигателя". Транзакции IEEE на Промышленных Приложениях. Издание IA-22, Номер 5, 1986, стр 820 - 827.
