Радарное сечение плоской круговой пластины
rcspat = rcsdisc(r,c,fc)r. Радарное сечение является функцией частоты сигнала, fc, и скорость распространения сигнала, c. Пластина принята, чтобы лечь на xy - плоскость. Центр пластины расположен в начале координат системы локальной координаты.
Отобразите шаблон радарного сечения (RCS) круговой пластины в зависимости от азимута и вертикального изменения. Радиус пластины составляет 22,5 см. Рабочая частота составляет 4,5 ГГц.
Задайте геометрию пластины и параметры сигнала.
c = physconst('Lightspeed');
fc = 4.5e9;
platerad = 0.225;Вычислите RCS для всех направлений с помощью значений направления по умолчанию.
[rcspat,azresp,elresp] = rcsdisc(platerad,c,fc); imagesc(azresp,elresp,pow2db(rcspat)) colorbar xlabel('Azimuth Angle (deg)') ylabel('Elevation Angle (deg)') title('Circular Plate RCS (dBsm)')

Постройте шаблон радарного сечения (RCS) круговой пластины в зависимости от угла возвышения для фиксированного угла азимута 5. Радиус пластины составляет 22,5 см. Рабочая частота составляет 4,5 ГГц.
Задайте радиус пластины и параметры сигнала.
c = physconst('Lightspeed');
fc = 4.5e9;
platerad = 0.225;Вычислите RCS в зависимости от вертикального изменения.
az = 5; el = -90:90; [rcspat,azresp,elresp] = rcsdisc(platerad,c,fc,az,el); plot(elresp,pow2db(rcspat)) xlabel('Elevation Angle (deg)') ylabel('RCS (dBsm)') title('Circular Plate RCS as Function of Elevation') grid on

Постройте шаблон радарного сечения (RCS) круговой пластины в зависимости от частоты для одного азимута и вертикального изменения. Радиус пластины 22,5 см.
Задайте радиус пластины и параметры сигнала.
c = physconst('Lightspeed');
platerad = 0.225;Вычислите RCS в области значений частот для одного направления.
az = 5.0; el = 20.0; fc = (100:10:4000)*1e6; [rcspat,azpat,elpat] = rcsdisc(platerad,c,fc,az,el); disp([azpat,elpat])
5 20
plot(fc/1e6,pow2db(squeeze(rcspat))) xlabel('Frequency (MHz)') ylabel('RCS (dBsm)') title('Circular Plate RCS as Function of Frequency') grid on

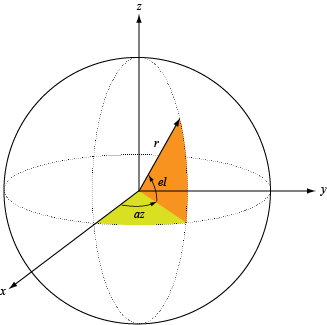
В этом разделе описываются соглашение, используемое, чтобы задать азимут и углы возвышения.
azimuth angle вектора является углом между x - осью и ее ортогональной проекцией на xy - плоскость. Угол положителен при движении от x - оси к y - ось. Углы азимута находятся между степенями на 180 ° и на-180 °, включительно. elevation angle является углом между вектором и его ортогональной проекцией на xy - плоскость. Угол положителен при движении к положительному z - оси от xy - плоскость. Углы возвышения находятся между степенями на 90 ° и на-90 °, включительно.
[1] Mahafza, Bassem. Анализ и проектирование радиолокационных систем Используя MATLAB, 2-го Эда. Бока-Ратон, FL: Chapman & Hall/CRC, 2005.
phased.BackscatterRadarTarget | phased.RadarTarget | rcscylinder | rcssphere | rcstruncone
