Задайте область рабочей области положений цели исполнительного элемента конца
workspaceGoalRegion объект задает область для допустимых положений цели исполнительного элемента конца. К демонстрационным положениям в границах целевой области используйте sample объектная функция. Можно также визуализировать границы, вы задаете использование show объектная функция.
Объект обычно используется с быстрым исследованием случайного дерева (RRT) планировщики как manipulatorRRT объект. sample генерирует альтернативные целевые состояния, чтобы увеличить вероятность нахождения допустимых путей.
Основные элементы целевой области заданы как свойства объектов:
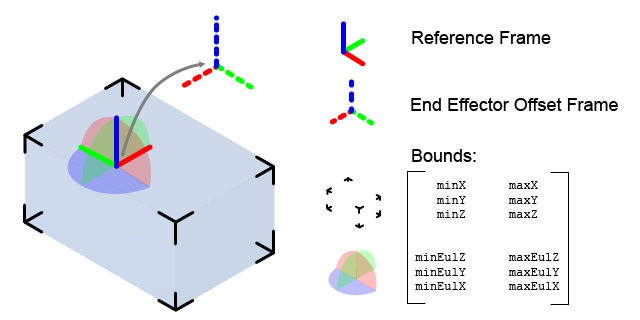
ReferencePose — Положение системы координат в мировой системе координат. Границы и положение смещения относительно этой системы координат.
EndEffectorOffsetPose — Положение смещения применилось к любому положению, произведенному в системе координат. Используйте это смещение, если исполнительный элемент конца должен быть расположен по-другому на основе схватывания или других геометрических ограничений.
Границы — Границы области как 6 2 матрица с минимальными и максимальными значениями для позиционного XYZ и ориентация Угла Эйлера ZYX, в соответствующих вектор-столбцах.
goalRegion = workspaceGoalRegion(EndEffectorName)EndEffectorName свойство.
goalRegion = workspaceGoalRegion(EndEffectorName,Name,Value)workSpaceGoalRegion("endEffector","Bounds",limits) создает область цели рабочей области со свойством Bounds, заданным как матрица.
Задайте целевую область в своей рабочей области и запланируйте путь в тех границах. workspaceGoalRegion объект задает границы на XYZ-позиционной и Эйлеровой ориентации ZYX исполнительного элемента конца робота. manipulatorRRT возразите планирует путь на основе той целевой области и выборок случайные положения в границах.
Загрузите существующую модель робота как rigidBodyTree объект.
robot = loadrobot("kinovaGen3", "DataFormat", "row"); ax = show(robot);

Создайте планировщика пути
Создайте планировщика пути к быстро исследующему случайному дереву (RRT) для робота. Этот пример использует пустую среду, но этот рабочий процесс также работает хорошо с нарушенными средами. Можно добавить, что столкновение возражает против среды как collisionBox или collisionMesh объект.
planner = manipulatorRRT(robot,{});Задайте целевую область
Создайте область цели рабочей области с помощью имени корпуса исполнительного элемента конца робота.
Задайте целевые параметры области для своей рабочей области. Целевая область включает ссылочное положение, XYZ-позиционные границы и пределы ориентации на Углах Эйлера ZYX. Этот пример задает границы на XY-плоскости в метрах и позволяет вращение вокруг оси Z в радианах.
goalRegion = workspaceGoalRegion(robot.BodyNames{end});
goalRegion.ReferencePose = trvec2tform([0.5 0.5 0.2]);
goalRegion.Bounds(1, :) = [-0.2 0.2]; % X Bounds
goalRegion.Bounds(2, :) = [-0.2 0.2]; % Y Bounds
goalRegion.Bounds(4, :) = [-pi/2 pi/2]; % Rotation about the Z-axisМожно также применить фиксированное смещение ко всем положениям, произведенным в области. Это смещение может составлять схватывание инструментов или изменений размерностей в вашей рабочей области. В данном примере примените фиксированное преобразование, которое помещает исполнительный элемент конца на 5 см выше рабочей области.
goalRegion.EndEffectorOffsetPose = trvec2tform([0 0 0.05]);
hold on
show(goalRegion);
Запланируйте путь к целевой области
Запланируйте путь к целевой области от домашней настройки робота. Из-за случайности в алгоритме RRT, этот пример устанавливает rng отберите, чтобы гарантировать повторяемые результаты.
rng(0) path = plan(planner,homeConfiguration(robot),goalRegion);
Покажите робота, выполняющего путь. Чтобы визуализировать более реалистический путь, интерполируйте точки между настройками пути.
interpConfigurations = interpolate(planner,path,5); for i = 1 : size(interpConfigurations) show(robot,interpConfigurations(i,:),"PreservePlot",false); set(ax,'ZLim',[-0.05 0.75],'YLim',[-0.05 1],'XLim',[-0.05 1],... 'CameraViewAngle',5) drawnow end hold off

Настройте положение исполнительного элемента конца
Заметьте, что манипулятор приближается к рабочей области от нижней части. Чтобы инвертировать ориентацию конечного положения, добавьте pi вращение к Оси Y для ссылочного положения.
goalRegion.EndEffectorOffsetPose = ... goalRegion.EndEffectorOffsetPose*eul2tform([0 pi 0],"ZYX");
Повторно запланируйте путь и визуализируйте движение робота снова. Робот теперь приближается от верхней части.
hold on show(goalRegion); path = plan(planner,homeConfiguration(robot),goalRegion); interpConfigurations = interpolate(planner,path,5); for i = 1 : size(interpConfigurations) show(robot, interpConfigurations(i, :),"PreservePlot",false); set(ax,'ZLim',[-0.05 0.75],'YLim',[-0.05 1],'XLim',[-0.05 1]) drawnow; end hold off

Беренсон, Дмитрий, Сиддхартха С. Сриниваса, Дэйв Фергюсон, Альваро Кольет и Джеймс Дж. Каффнер. "Манипуляция, Планирующая с областями Цели Рабочей области". На 2 009 Международных конференциях IEEE по вопросам Робототехники и Автоматизации (ICRA), 618–24. Кобе, Япония: Институт инженеров по электротехнике и электронике, 2009. https://doi.org/10.1109/ROBOT.2009.5152401.
manipulatorRRT | sample | show
