При использовании Simulink® с ROS можно опубликовать или подписаться на темы в сети ROS. В диалоговых окнах для Publish и блоков Subscribe, можно выбрать из списка тем в сети ROS. Вы должны быть в настоящее время соединены с сетью ROS, чтобы получить список тем. Можно выбрать тему с помощью следующего:
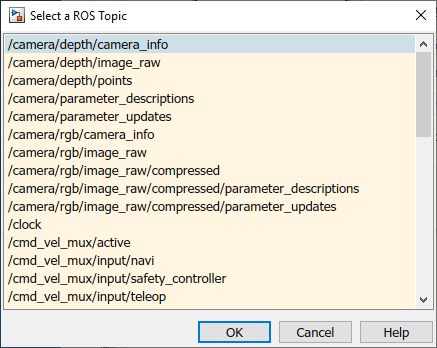
Это диалоговое окно показывает список тем, доступных на ведущем устройстве ROS. Выбор темы из списка автоматически заполняет Topic и параметры Message type для соответствующего диалогового окна маски блока. Если тип сообщения не поддержится в MATLAB® ROS, Simulink выдаст ошибку. Если тема выбрана, это сохранено с блоком. Даже если тема не будет более длинна доступный в сети, блок будет все еще использовать то название темы.
Чтобы обновить список, закройте и откройте диалоговое окно снова.
Чтобы использовать тему, не в настоящее время отправленную в сети ROS или если вы в настоящее время не соединяетесь, используйте, “Задают вашу собственную” опцию под параметром Topic Source в вашем диалоговом окне маски блока.
Simulink ROS позволяет вам выбирать из списка типов сообщений, в настоящее время поддержанных MATLAB ROS при установке Message type для Publish, Subscribe или Пустых блоков сообщения.
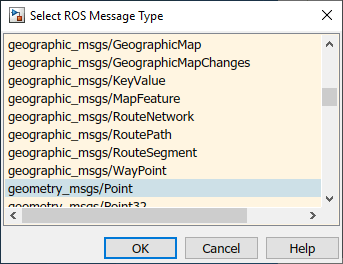
Это - список всех типов сообщений, поддержанных в MATLAB ROS включая любые пользовательские типы сообщений. Можно начать вводить от имени желаемого типа сообщения или вручную перерыть список.
Выбранный тип сообщения хранится с блоком и сохраненный с моделью.
Примечание: При использовании генерации кода, информация о типе сообщения не включена. Необходимо гарантировать, что среде ROS Linux установили пакеты ROS, которые содержат необходимые определения типа сообщения.
При использовании Get Parameter и блоков Set Parameter, у вас есть опция "Выбора из Сети ROS" в параметрах блоков, который получает список параметров в настоящее время на сервере. При нажатии на Select необходимо видеть это диалоговое окно.
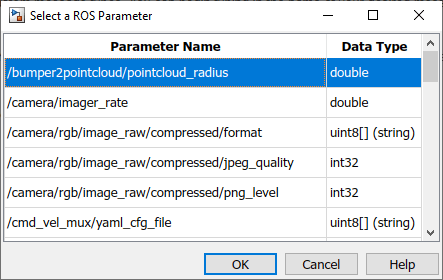
Это - список параметров, которые можно выбрать из сервера параметра ROS. Параметры, которые отображаются серым, не поддержали типы данных. Выберите название параметра, которое не является grayed, и нажмите OK. Это должно автозаполнить Name и Data type в параметры блоков.
Blank Message | Get Parameter | Publish | Set Parameter | Subscribe
