Ограниченный дифференциал как планетарный конический механизм
Powertrain Blockset / Ходовая часть / Финал Управляет Модулем
Vehicle Dynamics Blockset / Трансмиссия / Ходовая часть / Финал Управляет Модулем
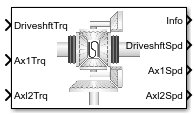
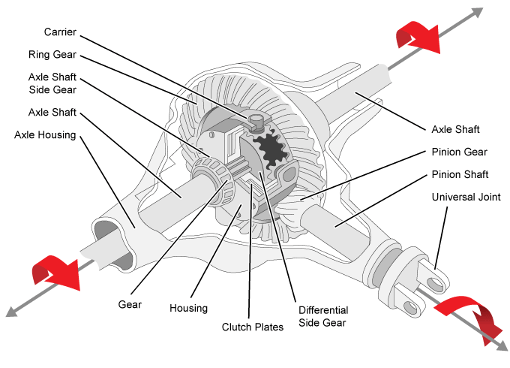
Блок Limited Slip Differential реализует дифференциал как планетарную коническую зубчатую передачу. Блок соответствует, скос карданного вала связывают с короной (кольцевой) конический механизм. Можно задать:
Отношение поставщика услуг к карданному валу
Коронуйте местоположение колеса
Вязкий и коэффициенты демпфирования для осей и поставщика услуг
Тип связи промаха
Используйте блок в анализе автомобильной трансмиссии уровня системы с учетом передачи степени с передачи на колеса. Блок подходит для использования в оборудовании в цикле рабочих процессах оптимизации и (HIL). Все параметры являются настраиваемыми.
В ограниченном дифференциале промаха, чтобы препятствовать тому, чтобы одно из колес уменьшилось, дифференциал разделяет, крутящий момент применился к левым и правым осям. С различным крутящим моментом, к которому применяются оси, колеса могут переместиться в различные скорости вращения, предотвратив промах. Реализации блока три метода для связи различных крутящих моментов применились к осям:
Предварительно загруженная идеальная муфта
Подсуньте зависимые скоростью данные о крутящем моменте
Введите зависимые данные о крутящем моменте крутящего момента
Блок использует систему координат, которая производит положительную шину и движение транспортного средства для стандартного механизма, передачи и дифференциальных настроек. Стрелки указывают на положительное движение.
С учетом КПД блока используйте параметр Efficiency factors. Эта таблица суммирует реализацию блока для каждой установки.
| Установка | Реализация |
|---|---|
| Постоянный КПД, который можно установить параметром Constant efficiency factor, eta. |
| КПД в зависимости от основного входного крутящего момента механизма, температуры воздуха и скорости карданного вала. Используйте эти параметры, чтобы задать интерполяционную таблицу и точки останова:
Для температуры воздуха вы можете также:
Чтобы выбрать метод интерполяции, используйте параметр Interpolation method. Для получения дополнительной информации смотрите Методы интерполяции. |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Механическая энергия от карданного вала | |
| Механическая энергия от оси 1 | |||
| Механическая энергия от оси 2 | |||
|
|
| Общие потери мощности | ||
| Потери мощности из-за затухания | |||
| Потери мощности, должные сжимать | |||
|
|
| Изменение уровня сохраненной внутренней энергии | ||
Блок Limited Slip Differential реализует эти дифференциальные уравнения, чтобы представлять механический динамический ответ для механизма короны, оставленного ось и правильную ось.
| Механический динамический ответ | Дифференциальное уравнение |
|---|---|
| Коронуйте механизм |
|
| Оставленная ось |
|
| Правильная ось |
|
Блок принимает жесткое соединение между механизмом короны и осями. Эти уравнения ограничений применяются.
Уравнения используют эти переменные.
| N | Передаточное отношение поставщика услуг к карданному валу |
| Jd | Вращательная инерция блока механизма короны |
| bd | Коронуйте механизм линейное вязкое затухание |
| ωd | Карданный вал угловая скорость |
Подсуньте скорость | |
| J1 | Ось 1 вращательная инерция |
| b1 | Ось 1 линейное вязкое затухание |
| ω1 | Ось 1 скорость |
| J2 | Ось 2 вращательной инерции |
| b2 | Ось 2 линейных вязких затухания |
| ω2 | Ось 2 угловых скорости |
| η | Эффективность |
| Td | Крутящий момент карданного вала |
| T1 | Ось 1 крутящий момент |
| T2 | Ось 2 крутящих момента |
| Ti | Ось внутренний крутящий момент сопротивления |
| Ti1 | Ось 1 внутренний крутящий момент сопротивления |
| Ti2 | Ось 2 внутренних крутящих момента сопротивления |
| μ | Коэффициент трения |
Эффективный радиус муфты | |
Кольцевой диск внешний радиус | |
| Ri | Кольцевой диск внутренний радиус |
| Fc | Сожмите силу |
| Tc | Сожмите крутящий момент |
| μ | Коэффициент трения |
Табличные блоки в Limited Slip Differential имеют эти установки параметров:
Метод интерполяции Linear
ExtrapolationMethod Clip
Идеальная модель связи муфты использует скорость промаха оси и трение, чтобы вычислить крутящий момент муфты. Коэффициент трения является функцией скорости промаха.
Радиусы диска определяют эффективный радиус муфты, по которому действует сила муфты.
Скорости вращения осей определяют скорость промаха.
Чтобы вычислить крутящий момент муфты, модель связи скорости промаха использует данные о крутящем моменте, которые являются функцией скорости промаха. Скорости вращения осей определяют скорость промаха.
Чтобы вычислить крутящий момент муфты, входная модель связи крутящего момента использует данные о крутящем моменте, которые являются функцией входного крутящего момента.
Блок Open Differential принимает жесткое соединение между механизмом короны и осями. Эти уравнения ограничений применяются.
[1] Deur, J., Ivanović, V., Хэнкок, M. и Assadian, F. "Моделирование Активной Дифференциальной Динамики". В продолжениях ASME. Системы транспортировки. Издание 17, стр: 427-436.
