Реализуйте инерциальный измерительный блок (IMU) с тремя осями
Vehicle Dynamics Blockset / датчики
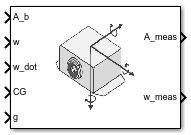
Блок Three-Axis Inertial Measurement Unit реализует инерциальный измерительный блок (IMU), содержащий акселерометр с тремя осями и гироскоп с тремя осями.
Для описания уравнений и приложения ошибок, смотрите Акселерометр С тремя осями (Aerospace Blockset) и Гироскоп С тремя осями (Aerospace Blockset).
Ошибка Vibropendulous, гистерезис влияет, anisoelastic смещение и смещение anisoinertial не составляются в этом блоке.
Этот блок не предназначается, чтобы смоделировать внутреннюю динамику различных форм инструмента.
A_b — Фактические ускоренияФактические ускорения в зафиксированных телом осях в виде трехэлементного вектора, в выбранных модулях.
Типы данных: double
w — Угловые уровниУгловые уровни в зафиксированных телом осях в виде трехэлементного вектора, в радианах в секунду.
Типы данных: double
w_dot — Угловые ускоренияУгловые ускорения в зафиксированных телом осях в виде трехэлементного вектора, в радианах в секунду придали квадратную форму.
Типы данных: double
CG — Местоположение центра тяжестиМестоположение центра тяжести в виде трехэлементного вектора, в выбранных модулях.
Типы данных: double
g — Сила тяжестиСила тяжести в связанной оси в виде трехэлементного вектора, в выбранных модулях.
Типы данных: double
A_meas — Измеренные ускоренияИзмеренные ускорения от акселерометра в виде трехэлементного вектора, в выбранных модулях.
Типы данных: double
w_meas — Измеренные угловые уровниИзмеренные угловые уровни от гироскопа в виде трехэлементного вектора, в радианах в секунду.
Типы данных: double
Units МодулиMetric (MKS) (значение по умолчанию) | EnglishМодули ввода и вывода в виде:
| Модули | Ускорение | Длина |
|---|---|---|
Metric (MKS)
| Метры в секунду придали квадратную форму | Метры |
English
| Футы в секунду за секунду | Футы |
Параметры блоков: units |
| Ввод: символьный вектор |
Значения: 'Metric (MKS)' | 'English' |
Значение по умолчанию: 'Metric (MKS)' |
IMU location — Местоположение IMUМестоположение IMU, который является также местоположением группы акселерометра, от центра тяжести транспортного средства, вдоль зафиксированной транспортным средством оси. Эта ссылка измерений является тем же самым для входа центра тяжести. Модули находятся в выбранных единицах длины.
Параметры блоков: imu |
| Ввод: символьный вектор |
| Значения: трехэлементный вектор |
Значение по умолчанию: '[0 0 0]' |
Update rate — Частота обновленияЧастота обновления акселерометра и гироскопа в виде действительного, удваивает скаляр в секундах. Частота обновления 0 создает непрерывный акселерометр и непрерывный гироскоп. Если вы выбираете параметр Noise on, и частота обновления 0, блок обновляет шум на уровне 0,1.
Совет
Если вы:
Обновите это значение параметров к 0 (непрерывный)
Сконфигурируйте решатель фиксированного шага для модели
необходимо также установить флажок Automatically handle rate transition for data transfer в панели Solver. Этот флажок позволяет программному обеспечению обработать переходы уровня правильно.
Параметры блоков: a_Ts |
| Ввод: символьный вектор |
| Значения: действительные, удваивают скаляр |
Значение по умолчанию: '0' |
Second order dynamics for accelerometer — Динамика второго порядкаon (значение по умолчанию) | offЧтобы применить динамику второго порядка к ускоряющим показаниям, установите этот флажок.
Параметры блоков: dtype_a |
| Ввод: символьный вектор |
Значения: 'on' | 'off' |
Значение по умолчанию: 'on' |
Accelerometer natural frequency (rad/sec) — Собственная частота акселерометраСобственная частота акселерометра в виде действительного, удваивает скаляр в радианах в секунду.
Параметры блоков: w_a |
| Ввод: символьный вектор |
| Значения: действительные, удваивают скаляр |
Значение по умолчанию: '190' |
Чтобы включить этот параметр, выберите Second order dynamics for accelerometer.
Accelerometer damping ratio — Коэффициент затухания акселерометраКоэффициент затухания акселерометра в виде действительного, удваивает скаляр без размерностей.
Параметры блоков: z_a |
| Ввод: символьный вектор |
| Значения: действительные, удваивают скаляр |
Значение по умолчанию: '0.707' |
Чтобы включить этот параметр, выберите Second order dynamics for accelerometer.
Accelerometer scale factor and cross-coupling — Масштабный коэффициент и перекрестная связьМасштабный коэффициент и перекрестная связь в виде 3х3 матрицы, чтобы скосить акселерометр от осей тела и масштабировать ускорения вдоль осей тела.
Параметры блоков: a_sf_cc |
| Ввод: символьный вектор |
| Значения: 3х3 матрица |
Значение по умолчанию: '[1 0 0; 0 1 0; 0 0 1]' |
Accelerometer measurement bias — Смещение измерения акселерометраДолгосрочные смещения вдоль осей акселерометра в виде трехэлементного вектора, в выбранных ускоряющих модулях.
Параметры блоков: a_bias |
| Ввод: символьный вектор |
| Значения: трехэлементный вектор |
Значение по умолчанию: '[0 0 0]' |
Accelerometer upper and lower limits — Минимальные и максимальные значения ускорения[-inf -inf -inf inf inf inf] (значение по умолчанию) | вектор с шестью элементамиТри минимальных значения и три максимальных значения ускорения в каждой из осей акселерометра в виде вектора с шестью элементами, в выбранных ускоряющих модулях.
Параметры блоков: a_sat |
| Ввод: символьный вектор |
| Значения: вектор с шестью элементами |
Значение по умолчанию: '[-inf -inf -inf inf inf inf]' |
Second-order dynamics for gyro — Гироскоп динамика второго порядкаon (значение по умолчанию) | offЧтобы применить динамику второго порядка к показаниям гироскопа, установите этот флажок.
Параметры блоков: dtype_g |
| Ввод: символьный вектор |
Значения: 'on' | 'off' |
Значение по умолчанию: 'on' |
Gyro natural frequency (rad/sec) — Собственная частота гироскопаСобственная частота гироскопа в виде действительного, удваивает скаляр в радианах в секунду.
Параметры блоков: w_g |
| Ввод: символьный вектор |
| Значения: действительные, удваивают скаляр |
Значение по умолчанию: '190' |
Чтобы включить этот параметр, выберите Second-order dynamics for gyro.
Gyro damping ratio — Коэффициент затухания гироскопаКоэффициент затухания гироскопа в виде действительного, удваивает шкалу без размерностей.
Параметры блоков: z_g |
| Ввод: символьный вектор |
| Значения: действительные, удваивают скаляр |
Значение по умолчанию: '0.707' |
Чтобы включить этот параметр, выберите Second-order dynamics for gyro.
Gyro scale factors and cross-coupling — Масштабные коэффициенты гироскопа и перекрестная связьМасштабные коэффициенты гироскопа и перекрестная связь в виде 3х3 матрицы, чтобы скосить гироскоп от осей тела и масштабировать угловые уровни вдоль осей тела.
Параметры блоков: g_sf_cc |
| Ввод: символьный вектор |
| Значения: 3х3 матрица |
Значение по умолчанию: '[1 0 0; 0 1 0; 0 0 1]' |
Gyro measurement bias — Смещение измерения гироскопаДолгосрочные смещения вдоль осей гироскопа, заданных трехэлементный вектор, в радианах в секунду.
Параметры блоков: g_bias |
| Ввод: символьный вектор |
| Значения: трехэлементный вектор |
Значение по умолчанию: '[0 0 0]' |
G-sensitive bias — Максимальное изменение в уровняхМаксимальное изменение в уровнях из-за линейного ускорения в виде трехэлементного вектора, в радианах в секунду на g-модуль.
Параметры блоков: g_sens |
| Ввод: символьный вектор |
| Значения: трехэлементный вектор |
Значение по умолчанию: '[0 0 0]' |
Gyro upper and lower limits — Минимальные и максимальные значения угловых уровней[-inf -inf -inf inf inf inf] (значение по умолчанию) | вектор с шестью элементамиТри минимальных значения и три максимальных значения угловых уровней в каждой из осей гироскопа в виде вектора с шестью элементами, в радианах в секунду.
Параметры блоков: g_sat |
| Ввод: символьный вектор |
| Значения: вектор с шестью элементами |
Значение по умолчанию: '[-inf -inf -inf inf inf inf]' |
Noise on — Белый шумon (значение по умолчанию) | offЧтобы применить белый шум к ускорению и показаниям гироскопа, установите этот флажок.
Параметры блоков: a_rand |
| Ввод: символьный вектор |
Значения: 'on' | 'off' |
Значение по умолчанию: 'on' |
Noise seeds — Шумовые seedСкалярные seed для Гауссова шумового генератора для каждой оси акселерометра и гироскопа в виде вектора с шестью элементами.
Параметры блоков: a_seeds |
| Ввод: символьный вектор |
| Значения: вектор с шестью элементами |
Значение по умолчанию: '[23093 23094 23095 23096 23097 23098]' |
Чтобы включить этот параметр, выберите Noise on.
Noise power — Шумовая степеньВысота степени спектральной плотности (PSD) белого шума для каждой оси акселерометра и гироскопа в виде вектора с шестью элементами, в:
(m/s2) / Гц для Metric (MKS)
(ft/s2) / Гц для English
Параметры блоков: a_pow |
| Ввод: символьный вектор |
| Значения: вектор с шестью элементами |
Значение по умолчанию: '[0.001 0.001 0.001 0.0001 0.0001 0.0001]' |
Чтобы включить этот параметр, выберите Noise on.
[1] Роджерс, R. M. прикладная математика в интегрированных системах навигации, образовательном ряду AIAA, 2000.
Three-axis Accelerometer (Aerospace Blockset) | Three-axis Gyroscope (Aerospace Blockset)
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.

