Вы только смотрите однажды (YOLO) v3 детектор объектов является многошкальной сетью обнаружения объектов, которая использует сеть извлечения признаков и несколько голов обнаружения, чтобы сделать предсказания в нескольких шкалах.
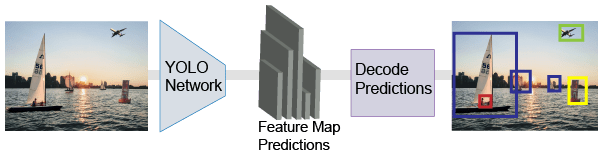
Модель обнаружения объектов YOLO v3 запускает сверточную нейронную сеть (CNN) глубокого обучения на входном изображении, чтобы произвести сетевые предсказания из нескольких карт функции. Детектор объектов собирает и декодирует предсказания, чтобы сгенерировать ограничительные рамки.
YOLO v3 использует поля привязки, чтобы обнаружить классы объектов в изображении. Для получения дополнительной информации смотрите, что Поля Привязки для Объектного Detection.The YOLO v3 предсказывают эти три атрибута для каждого поля привязки:
Пересечение по объединению (IoU) — Предсказывает счет объектности каждого поля привязки.
Смещения поля привязки — Совершенствовали положение поля привязки
Вероятность класса — Предсказывает метку класса, присвоенную каждому полю привязки.
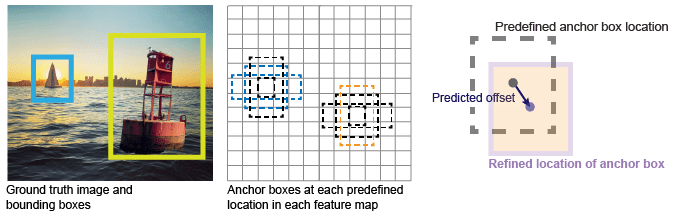
Рисунок показывает предопределенные поля привязки (пунктирные линии) в каждом местоположении в карте функции и усовершенствованном местоположении после того, как смещения будут применены. Совпадающие поля с классом в цвете.
Чтобы спроектировать сеть обнаружения объектов YOLO v3, выполните эти шаги.
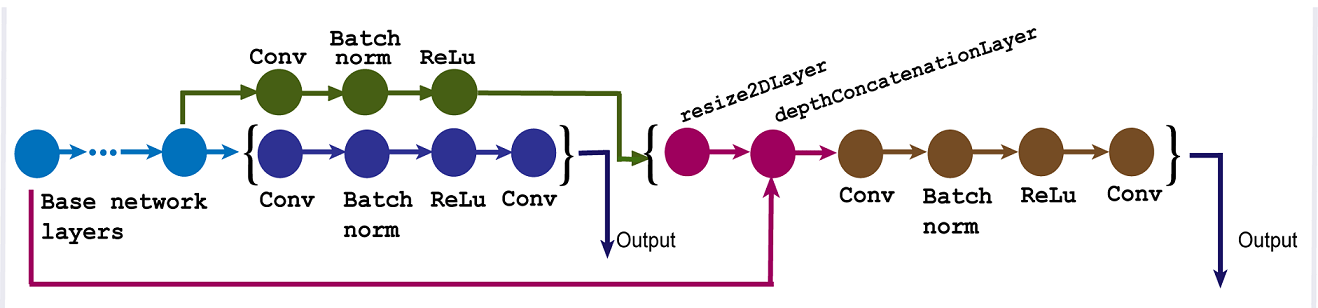
Начните модель с сети извлечения признаков. Сеть извлечения признаков служит основной сетью для создания нейронной сети для глубокого обучения YOLO v3. Основная сеть может быть предварительно обученным или нетренированным CNN. Если основная сеть является предварительно обученной сетью, можно использовать обучение с переносом.
Создайте подсети обнаружения при помощи свертки, нормализации партии. и слоев ReLu. Добавьте подсети обнаружения в любой из слоев в основной сети. Выходные слои, которые соединяются как входные параметры с подсетями обнаружения, являются источником сети обнаружения. Любой слой от сети извлечения признаков может использоваться в качестве источника сети обнаружения. Чтобы использовать многошкальные функции для обнаружения объектов, выберите карты функции различных размеров.
Чтобы вручную создать нейронную сеть для глубокого обучения YOLO v3, используйте приложение Deep Network Designer (Deep Learning Toolbox). Чтобы программно создать нейронную сеть для глубокого обучения YOLO v3, используйте yolov3ObjectDetector объект.
Чтобы использовать обучение с переносом, можно использовать предварительно обученную нейронную сеть для глубокого обучения в качестве основной сети для нейронной сети для глубокого обучения YOLO v3. Сконфигурируйте глубокое обучение YOLO v3 для обучения на новом наборе данных путем определения полей привязки и новых классов объектов. Используйте yolov3ObjectDetector объект создать сеть обнаружения YOLO v3 из любого предварительно обученного CNN, как SqueezeNet и используйте обучение с переносом. Для списка предварительно обученного CNNs смотрите Предварительно обученные Глубокие нейронные сети (Deep Learning Toolbox).
Чтобы изучить, как создать пользовательский детектор объектов YOLO v3 при помощи нейронной сети для глубокого обучения как основная сеть и обучаться для обнаружения объектов, смотрите, что Обнаружение объектов Использует пример YOLO v3 Глубокого обучения.
Можно использовать Image Labeler, Video Labeler или приложения Ground Truth Labeler (Automated Driving Toolbox), чтобы интерактивно помечать пиксели и экспортировать данные о метке для обучения. Приложения могут также использоваться, чтобы пометить прямоугольные видимые области (ROIs) для обнаружения объектов, метки сцены для классификации изображений и пиксели для семантической сегментации. Создать обучающие данные из любой из этикетировочных машин экспортировало объект основной истины, можно использовать objectDetectorTrainingData или pixelLabelTrainingData функции. Для получения дополнительной информации смотрите Обучающие данные для Обнаружения объектов и Семантической Сегментации.
[1] Redmon, Джозеф и Али Фархади. “YOLO9000: Лучше, Быстрее, Более сильный”. На 2 017 Конференциях по IEEE по Компьютерному зрению и Распознаванию образов (CVPR), 6517–25. Гонолулу, HI: IEEE, 2017. https://doi.org/10.1109/CVPR.2017.690.
[2] Redmon, Джозеф, Santosh Divvala, Росс Джиршик и Али Фархади. "Вы только смотрите однажды: Объединенное, обнаружение объектов в реальном времени". Продолжения Конференции по IEEE по Компьютерному зрению и Распознаванию образов (CVPR), 779–788. Лас-Вегас, NV: CVPR, 2016.
detect | forward | predict | preprocess