Выровняйте два потока пиксельных данных
visionhdl.PixelStreamAligner Система object™ синхронизирует потоки на два пикселя путем задержки одного потока, чтобы совпадать с синхронизацией ссылочного потока. Много алгоритмов Vision HDL Toolbox™ задерживают пиксельный поток, и сумма задержки может измениться, когда вы настраиваете параметры алгоритма. Можно использовать этот объект выровнять потоки для того, чтобы наложить, сравнить или объединить два потока такой как в Гауссовой операции размытости. Используйте задержанный поток в качестве refPixel и refCtrl аргументы. Используйте более ранний поток в качестве pixelIn и ctrlIn аргументы.
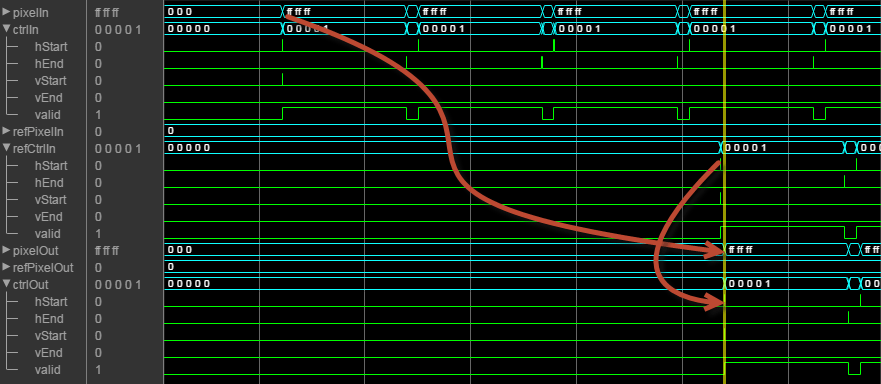
Эта схема формы волны показывает входные потоки, pixelIn и refPixelIn, и их связанные управляющие сигналы. Ссылочный входной кадр запускается позже, чем pixelIn система координат. Выходные сигналы показывают, что объект задерживает pixelIn совпадать со ссылочным потоком, и что оба потока вывода совместно используют управляющие сигналы. Форма волны показывает короткую задержку между входом refCtrl и выход refCtrl. В этой симуляции, чтобы вместить задержку четырех линий между входными потоками, MaxNumberofLines свойство должно быть установлено в по крайней мере 4.
Для получения дополнительной информации на пиксельной шине управления и размерностях видеокадра, смотрите Пиксельный Интерфейс Потоковой передачи.
Выровнять два потока пиксельных данных:
Создайте visionhdl.PixelStreamAligner объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?.
align = visionhdl.PixelStreamAligner(Name,Value)
align = visionhdl.PixelStreamAligner(Name,Value) создает Системный объект, который синхронизирует пиксельный поток со ссылочным пиксельным потоком. Установите свойства с помощью одной или нескольких пар "имя-значение". Заключите каждое имя свойства в одинарные кавычки. Например, 'MaxNumberOfLines',16 устанавливает буферную глубину, которая вмещает перемещение синхронизации между двумя входными потоками.
[pixelOut,refOut,ctrlOut]
= align(pixelIn,ctrlIn,refPixel,refCtrl)
[ синхронизирует пиксельный поток со ссылочным потоком, pixelOut,refOut,ctrlOut]
= align(pixelIn,ctrlIn,refPixel,refCtrl)refPixel и refCtrl, путем задержки первого входа, pixelIn, выровняться со ссылочным входом. Получившиеся выровненные пиксельные потоки, pixelOut и refOut, совместно используйте управляющие сигналы, ctrlOut. Можно использовать этот объект выровнять потоки для наложения или сравнения.
Этот объект использует пиксельный интерфейс потоковой передачи со структурой для сигналов управления кадром. Этот интерфейс включает объекту действовать независимо от размера изображения и формата, и соединиться с другими объектами Vision HDL Toolbox. Объект принимает и возвращает скалярное пиксельное значение и управляющие сигналы как структура, содержащая пять сигналов. Управляющие сигналы указывают на валидность каждого пикселя и его местоположения в системе координат. Чтобы преобразовать пиксельную матрицу в пиксельный поток и управляющие сигналы, используйте visionhdl.FrameToPixels объект. Для полного описания интерфейса смотрите Пиксельный Интерфейс Потоковой передачи.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Наложите обработанный видеопоток на входном потоке.
Подготовьте тестовое изображение путем выбора фрагмента файла изображения.
frmActivePixels = 64; frmActiveLines = 48; frmOrig = imread('rice.png'); frmInput = frmOrig(1:frmActiveLines,1:frmActivePixels); figure imshow(frmInput,'InitialMagnification',300) title 'Input Image'
![]()
Создайте сериализатор и задайте размер неактивных пиксельных областей.
frm2pix = visionhdl.FrameToPixels( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines, ... 'TotalPixelsPerLine',frmActivePixels+10, ... 'TotalVideoLines',frmActiveLines+10, ... 'StartingActiveLine',6, ... 'FrontPorch',5);
Сериализируйте тестовое изображение. pixIn вектор из значений интенсивности. ctrlIn вектор из структур управляющего сигнала. Предварительно выделите векторы для выходных сигналов.
[pixIn,ctrlIn] = frm2pix(frmInput);
[~,~,numPixelsPerFrame] = getparamfromfrm2pix(frm2pix);
ctrlOut = repmat(pixelcontrolstruct,numPixelsPerFrame,1);
overlayOut = zeros(numPixelsPerFrame,1,'uint8');
Запишите функцию, которая создает и вызывает Системные объекты, чтобы обнаружить ребра и выровнять данные о ребре с исходными пиксельными данными. Результаты ребра задерживаются задержкой visionhdl.EdgeDetector объект. Связанные управляющие сигналы становятся ссылкой для выровненного потока. Можно сгенерировать HDL от этой функции.
function [pixelOut,ctrlOut] = EdgeDetectandOverlay(pixelIn,ctrlIn) % EdgeDetectandOverlay % Detect edges in an input stream, and overlay the edge data onto the % original stream. % pixelIn and ctrlIn are a scalar pixel and its associated pixelcontrol % structure, respectively. % You can generate HDL code from this function. persistent align if isempty(align) align = visionhdl.PixelStreamAligner; end persistent find_edges if isempty(find_edges) find_edges = visionhdl.EdgeDetector; end [edgeOut,edgeCtrl] = find_edges(pixelIn,ctrlIn); [origOut,alignedEdgeOut,ctrlOut] = align(pixelIn,ctrlIn,edgeOut,edgeCtrl); if (alignedEdgeOut) pixelOut = uint8(0); % Set edge pixels to black else pixelOut = origOut; end end
Для каждого пикселя в системе координат вызовите функцию, чтобы искать ребра и выровнять данные о ребре с входным потоком.
for p = 1:numPixelsPerFrame [overlayOut(p),ctrlOut(p)] = EdgeDetectandOverlay(pixIn(p),ctrlIn(p)); end
Создайте объект deserializer с форматом, совпадающим с тем из сериализатора. Преобразуйте пиксельный поток во фрейм изображения путем вызова объекта deserializer. Отобразите получившееся изображение.
pix2frm = visionhdl.PixelsToFrame( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines); [frmOutput,frmValid] = pix2frm(overlayOut,ctrlOut); if frmValid figure imshow(frmOutput,'InitialMagnification',300) title 'Output Image' end
![]()
