Трансмиссия с двойным сцеплением, прикладывающая крутящий момент к приводному валу
Блок силового агрегата/системы передачи/передачи
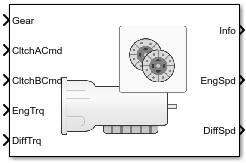
Блок передачи с двойным сцеплением реализует передачу с двойным сцеплением (DCT). В DCT две муфты прикладывают механический крутящий момент к приводному валу. Нечетные шестерни входят в зацепление с одной муфтой, в то время как четные шестерни входят в зацепление с вторичной муфтой. Количество зубчатых колес задается целочисленным вектором с соответствующими передаточными числами, инерциями, вязким демпфированием и коэффициентами КПД. Скорости сцепления и синхронизации являются линейными и регулируемыми. Можно предоставить внешние сигналы сцепления или сконфигурировать блок для генерации идеализированных внутренних сигналов сцепления. Блок реализует модель передачи с минимальной параметризацией или вычислительной стоимостью.
Используйте блок для моделирования упрощенной автоматизированной механической коробки передач (АМТ) для:
Определение мощности и крутящего момента
Определение влияния передаточного числа на экономичность топлива и производительность
Для определения частоты вращения приводного вала и момента реакции блок передачи с двойным сцеплением вычисляет:
Блокировка сцепления и трение сцепления
Зафиксированная динамика вращения
Разблокированная динамика вращения
Чтобы задать расчет эффективности блока, для параметра «Коэффициент эффективности» выберите любую из этих опций.
| Настройка | Блокирование реализации |
|---|---|
Gear only | Эффективность определяется из таблицы поиска 1D, которая является функцией зубчатого колеса. |
Gear, input torque, input speed, and temperature | Эффективность определяется из таблицы поиска 4D, которая является функцией:
|
DCT непрерывно передает крутящий момент приводного вала, управляя сигналами давления от обеих муфт. При выборе параметра «Режим управления» Ideal integrated controllerблок генерирует идеализированные сигналы давления сцепления. Блок использует максимальное давление от каждой муфты для аппроксимации команд с одним сцеплением, которые приводят к эквивалентному крутящему моменту приводного вала. Для использования собственных сигналов управления сцеплением выберите Параметр режима управления External control.
Основываясь на состоянии блокировки сцепления, блок реализует одну из этих моделей трения.
| Если | Состояние сцепления | Модель трения |
|---|---|---|
| Незапертый | − Ri3) 3 (Ro2 − Ri2) | |
| Запертый |
Tf = Ts |
Уравнения используют эти переменные.
| ωt | Выходная частота вращения приводного вала |
| ωi | Скорость входного приводного вала |
| ωd | Частота вращения ведущего вала |
Вязкое демпфирование | |
| ФК | Приложенное усилие сцепления |
| N | Зацепленное зубчатое колесо |
Момент трения | |
Кинетический момент трения | |
Статический фрикционный момент | |
Эффективный радиус сцепления | |
Внешний радиус кольцевого диска | |
Внутренний радиус кольцевого диска | |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
Для моделирования динамики вращения при блокировке муфты блок реализует эти уравнения.
Блок определяет входной крутящий момент Ti посредством дифференциации.
Уравнения используют эти переменные.
| ωi | Скорость входного приводного вала |
| ωd | Частота вращения ведущего вала |
| N | Зацепленное зубчатое колесо |
| миллиард | Вязкое демпфирование в зацеплении с шестерней |
| JN | Инерция зацепленной передачи |
| ηN | Эффективность передачи в зацеплении |
| Td | Крутящий момент приводного вала |
| Ti | Приложенный входной крутящий момент |
Для моделирования динамики вращения при разблокировании муфты блок реализует это уравнение.
где:
| ωd | Частота вращения ведущего вала |
| N | Зацепленное зубчатое колесо |
| миллиард | Вязкое демпфирование в зацеплении с шестерней |
| JN | Инерция зацепленной передачи |
| Td | Крутящий момент приводного вала |
| Ti | Приложенный входной крутящий момент |
Для учета мощности блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Мощность двигателя | Пенг | |
PwrDiffrntl | Дифференциальная мощность | Pdiff | |||
|
| PwrEffLoss | Потеря механической мощности | Peffloss | 1) | |
PwrDampLoss | Механические потери демпфирования | Pdamploss | |||
PwrCltchLoss | Потеря мощности сцепления | Pmech | При блокировке: При разблокировании: Nstartd) | ||
|
| PwrStoredTrans | Изменение скорости вращательной кинетической энергии | Pstr | При блокировке: JNN2) При разблокировании: | |
Уравнения используют эти переменные.
| миллиард | Вязкое демпфирование в зацеплении с шестерней |
| JN | Инерция вращения зацепленной шестерни |
| Чжин | Инерция вращения маховика |
| ηN | Эффективность передачи в зацеплении |
| N | Передаточное число в зацеплении |
| Ti | Приложенный входной крутящий момент, обычно от коленчатого вала двигателя или демпфера с двойным маховиком |
| Td | Приложенный момент нагрузки, обычно от дифференциала или приводного вала |
| ωd | Начальная скорость вращения входного приводного вала |
| starti, δ i | Угловая скорость и ускорение приводного вала |

