Продольное колесо с диском, барабаном или реперным тормозом
Блок силового агрегата/привод/колеса
Блоксеть/колеса и шины Vehicle Dynamics
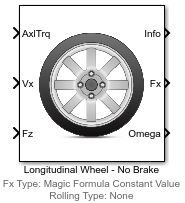
Блок продольного колеса реализует продольное поведение идеального колеса. Можно указать метод расчета продольной силы и сопротивления качению, а также тип тормоза. Использовать блок при моделировании трансмиссии и продольного движения транспортного средства, где для определения ускорения, торможения и сопротивления качению колеса требуются низкочастотные силы движения шины и торможения. Например, можно использовать блок для определения требований к крутящему моменту и мощности для указанного цикла привода или события торможения. Блок не подходит для применений, требующих комбинированного бокового скольжения.
Существует четыре типа блоков продольных колес. Каждый блок реализует свой тип тормоза.
| Имя блока | Настройка типа тормоза | Внедрение тормозов |
|---|---|---|
| Продольное колесо - без тормоза |
|
Ничего |
| Продольное колесо - дисковый тормоз |
|
Тормоз, преобразующий давление тормозного цилиндра в тормозное усилие. |
| Продольное колесо - барабанный тормоз |
|
Симплексный барабанный тормоз, преобразующий приложенную силу и геометрию тормоза в чистый тормозной момент. |
| Продольное колесо - отображенный тормоз |
|
Таблица поиска, которая является функцией скорости колеса и приложенного тормозного давления. |
Блок моделирует продольную силу как функцию проскальзывания колеса относительно поверхности дороги. Чтобы рассчитать продольную силу, задайте один из этих параметров.
| Настройка | Блокирование реализации |
|---|---|
|
|
Магическая формула с постоянным коэффициентом жесткости, формы, пика и кривизны. |
|
|
Магическая формула с зависимыми от нагрузки коэффициентами, которые реализуют уравнения 4.E9- 4.E18 в динамике шин и транспортных средств. |
|
|
Таблица поиска, которая является функцией нормального коэффициента силы и проскальзывания колеса. |
Чтобы рассчитать крутящий момент сопротивления качению, задайте один из этих параметров сопротивления качению.
| Настройка | Блокирование реализации |
|---|---|
| Ничего |
| Метод в методологии ступенчатого выбега для измерения сопротивления качению шины. Сопротивление качению является функцией давления в шине, нормальной силы и скорости. |
| Метод, указанный в ISO 28580:2018, Метод измерения сопротивления качению легковых автомобилей, грузовых автомобилей и шин - Испытание в одной точке и корреляция результатов измерений. |
| Уравнения магических формул из 4.E70 в Tire и Vehicle Dynamics. Магическая формула - эмпирическое уравнение, основанное на коэффициентах подгонки. |
| Таблица поиска, которая является функцией продольной скорости нормальной силы и оси вращения. |
Чтобы рассчитать вертикальное движение, задайте один из этих параметров.
| Настройка | Блокирование реализации |
|---|---|
| Блок передает приложенные усилия шасси непосредственно на расчеты сопротивления качению и продольной силы. |
| Вертикальное движение зависит от жесткости и демпфирования колеса. Жесткость является функцией смещения боковой стенки шины и давления. Демпфирование является функцией скорости и давления боковой стенки шины. |
Блок вычисляет инерционный отклик колеса в зависимости от:
Потери оси
Тормозной момент и крутящий момент привода
Сопротивление качению шины
Контакт с землей через интерфейс шины-дорога
Входной крутящий момент представляет собой сумму приложенного крутящего момента оси, тормозного момента и момента, возникающего из комбинированного крутящего момента шины.
Tb + Td
На момент, возникающий от комбинированного крутящего момента шины, блок реализует тяговые силы колес и сопротивление качению с динамикой первого порядка. Сопротивление качению имеет постоянную времени, параметризованную в терминах длины релаксации.
Fx Re + My)
Для расчета крутящего момента сопротивления качению можно задать один из этих параметров сопротивления качению.
| Настройка | Блокирование реализации |
|---|---|
| Блок задает сопротивление качению, |
| Блок использует метод, описанный в методе SAE Stepwise Coastdown Methody для измерения сопротивления качению шин. Сопротивление качению является функцией давления в шине, нормальной силы и скорости. В частности, tanh (4Vx)
|
| Блок использует метод, указанный в ISO 28580:2018, Метод измерения сопротивления качению легковых автомобилей, грузовых автомобилей и шин - Испытание в одной точке и корреляция результатов измерений. Метод учитывает нормальную нагрузку, паразитные потери и тепловые поправки от условий испытания. В частности, Fpl) tanh (λ) |
| Блок вычисляет сопротивление качению, |
| Для сопротивления качению, |
Если тормоза включены, блок определяет заблокированное или разблокированное состояние торможения на основе идеализированной модели трения сухого сцепления. Основываясь на состоянии блокировки, блок реализует эти модели трения и динамические модели.
| Если | Условие блокировки | Модель трения | Динамическая модель |
|---|---|---|---|
Незапертый | − Ri3) 3 (Ro2 − Ri2) | ||
Запертый | Ts |
Уравнения используют эти переменные.
| ω | Угловая скорость колеса |
| a | Компонент силы, не зависящий от скорости |
| b | Компонент силы линейной скорости |
| c | Компонент силы квадратичной скорости |
| Le | Длина релаксации шины |
| J | Момент инерции |
| Мой | Крутящий момент сопротивления качению |
| Ta | Приложенный крутящий момент на оси |
| TB | Тормозной момент |
| Td | Комбинированный крутящий момент шины |
| Tf | Момент трения |
| Ti | Чистый входной крутящий момент |
| Tk | Кинетический момент трения |
| Кому | Чистый выходной крутящий момент |
| Ts | Статический фрикционный момент |
| ФК | Приложенное усилие сцепления |
| Fx | Продольное усилие, создаваемое дорожным покрытием шины из-за проскальзывания |
| Reff | Эффективный радиус сцепления |
| Ro | Внешний радиус кольцевого диска |
| Ri | Внутренний радиус кольцевого диска |
| Ре | Эффективный радиус шины при нагрузке и при заданном давлении |
| Vx | Скорость продольной оси |
| Fz | Нормальная сила транспортного средства |
| Cr | Постоянное сопротивление качению |
| Tamb | Температура окружающей среды |
| Tmeas | Измеренная температура для постоянной сопротивления качению |
| Fpl | Паразитная потеря силы |
| Kt | Коэффициент термокоррекции |
| ɑ | Показатель давления в шинах |
| β | Показатель нормальной силы |
| пи | Давление в шинах |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
Если задан параметр «Тип тормоза» Discблок реализует дисковый тормоз. На этом рисунке показаны вид сбоку и спереди дискового тормоза.
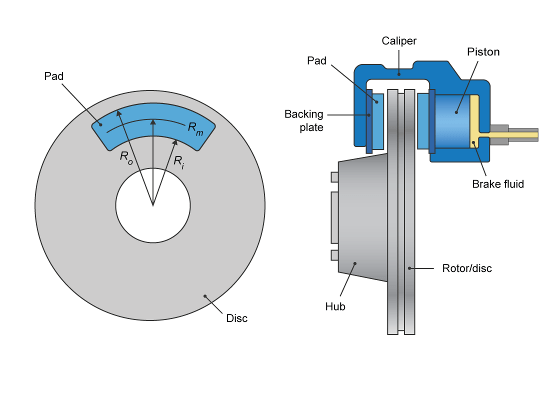
Дисковый тормоз преобразует давление в тормозном цилиндре в силу. Дисковый тормоз прикладывает усилие к среднему радиусу тормозной колодки.
Блок использует эти уравнения для вычисления тормозного момента дискового тормоза.
Ri2
Уравнения используют эти переменные.
| T | Тормозной момент |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| Npads | Количество тормозных колодок в узле дискового тормоза |
| μstatic | Коэффициент статического трения дисковой площадки-ротора |
| μ | Коэффициент кинетического трения дисковой площадки-ротора |
| Ba | Диаметр отверстия тормозного привода |
| Комната | Средний радиус приложения усилия тормозной колодки к тормозному ротору |
| Ro | Внешний радиус тормозной колодки |
| Ri | Внутренний радиус тормозной колодки |
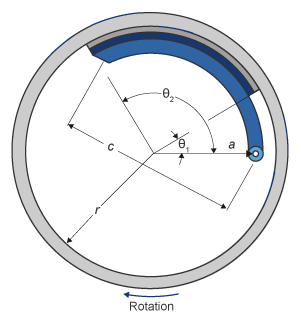
Если задан параметр «Тип тормоза» Drumблок реализует статический (стационарный) симплексный барабанный тормоз. Симплексный барабанный тормоз состоит из одного двустороннего гидропривода и двух тормозных колодок. Тормозные колодки не имеют общего шарнирного пальца.
Симплексная модель барабанного тормоза использует приложенную силу и геометрию тормоза для расчета чистого крутящего момента для каждой тормозной колодки. Модель барабана предполагает, что приводы и геометрия колодки симметричны для обеих сторон, позволяя использовать единый набор параметров геометрии и трения для обеих колодок.
Блок реализует уравнения, полученные из этих уравнений в основах элементов машины.
Уравнения используют эти переменные.
| T | Тормозной момент |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент статического трения дисковой площадки-ротора |
| μ | Коэффициент кинетического трения дисковой площадки-ротора |
| Trshoe | Тормозной момент правой колодки |
| Tlshoe | Тормозной момент левой колодки |
| a | Расстояние от центра барабана до центра оси шарнира колодки |
| c | Расстояние от центра оси шарнира колодки до соединения тормозного привода на тормозной колодке |
| r | Внутренний радиус барабана |
| Ba | Диаметр отверстия тормозного привода |
| Θ1 | Угол от центра оси шарнира колодки до начала материала тормозной колодки на колодке |
| Θ2 | Угол от центра оси шарнира колодки до конца материала тормозной колодки на колодке |
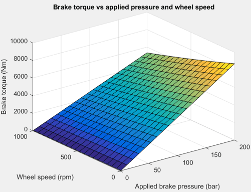
Если задан параметр «Тип тормоза» Mappedблок использует таблицу поиска для определения тормозного момента.
Уравнения используют эти переменные.
| T | Тормозной момент |
| N) | Таблица поиска тормозного момента |
| P | Приложенное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент трения поверхности поверхности контакта барабана в статических условиях |
| μ | Коэффициент трения поверхности раздела диск-подушка-ротор |
Справочная таблица для тормозного момента, N), является функцией приложенного тормозного давления и скорости колеса, где:
T - тормозной момент в Н· м.
Р - давление торможения, в бар.
N - частота вращения колеса, в об/мин.
Для моделирования продольных сил блока продольного колеса можно использовать магическую формулу. Модель обеспечивает установившуюся характеристическую функцию шины Fx = f (, Fz), продольную силу Fx на шине, основанную на:
Вертикальная нагрузка Fz
Проскальзывание колесика
Эти переменные используются в модели Magic Formula.
| Ω | Угловая скорость колеса |
| rw | Радиус колеса |
| Vx | Продольная скорость ступицы колеса |
| rwΩ | Продольная скорость протектора шины |
| Vsx = rwΛ - Vx | Скорость скольжения колеса |
| t = Vsx/| Vx | | Проскальзывание колеса |
| Фз, Fz0 | Вертикальная нагрузка и номинальная вертикальная нагрузка на шину |
| Fx = f (в, Fz) | Продольное усилие, прикладываемое к шине в точке контакта. Также характерная функция f шины. |
Если для параметра «Продольная сила» задано значение Magic Formula constant valueблок реализует магическую формулу как специфическую форму характеристической функции шины, характеризующуюся четырьмя безразмерными коэффициентами (B, C, D, E), или жесткостью, формой, пиком и кривизной:
Наклон f при/= 0 равен BCD· Fz.
Коэффициенты основаны на эмпирических данных шины. Эти значения являются типичными наборами постоянных коэффициентов магической формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухой тармак | 10 | 1.9 | 1 | 0.97 |
| Влажный тармак | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Если для параметра «Продольная сила» задано значение Magic Formula pure longitudinal slipблок реализует более общую магическую формулу, используя безразмерные коэффициенты, которые являются функциями нагрузки шины. Блок реализует уравнения продольной силы, приведенные в главе 4 документа «Динамика шин и транспортных средств», включая 4.E9- 4.E18:
pVx2dfz) λVxλ 'μxς1
SHx и SVx представляют смещения к скользящей и продольной силе в функции «сила-скольжение» или горизонтальные и вертикальные смещения, если функция отображается как кривая. мкх - коэффициент трения, зависящий от продольной нагрузки. αx - небольшое число, вставленное для предотвращения деления на ноль, когда Fz приближается к нулю.
Если вертикальные степени свободы не выбраны, для параметра Вертикальное движение (Vertical Motion) задано значение Noneблок пропускает приложенные усилия шасси непосредственно к расчетам сопротивления качению и продольной силы.
Если для параметра «Вертикальное движение» задано значение Mapped stiffness and dampingвертикальное движение зависит от жесткости колеса и демпфирования. Жесткость является функцией смещения боковой стенки шины и давления. Демпфирование является функцией скорости и давления боковой стенки шины.
z˙,Ptire)
Блок определяет вертикальный отклик, используя это дифференциальное уравнение.
Fz − мг
При отключении вертикальной степени свободы входная нормальная сила от транспортного средства переходит непосредственно к расчетам продольной силы и силы качения.
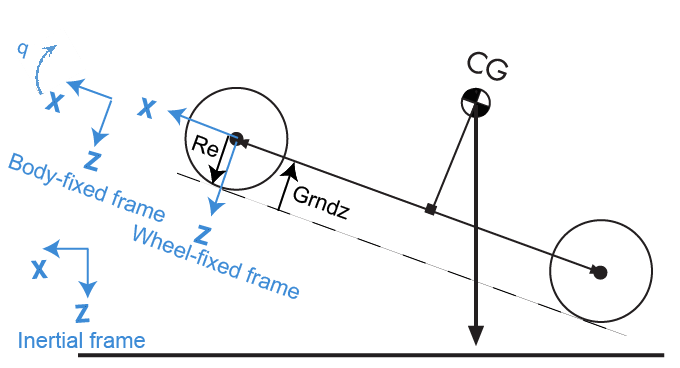
Блок использует закрепленную на колесе раму для разрешения вертикальных сил.
Уравнения используют эти переменные.
| Fztire |
Нормальная сила шины вдоль оси Z, закрепленной на колесе |
| m |
Масса оси |
| Fzk |
Нормальная сила шины, обусловленная жесткостью колеса вдоль оси Z, зафиксированной колесом |
| Fzb |
Нормальная сила шины из-за демпфирования колеса вдоль оси Z, закрепленной на колесе |
| Fz |
Подвеска или обычное усилие транспортного средства вдоль оси Z, закрепленной на колесе |
| PTire |
Давление в шинах |
|
Смещение, скорость и ускорение шины соответственно вдоль оси Z, закрепленной на колесе |
Для учета мощности блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Тяговая мощность, подаваемая от оси | FxVx |
| Внешний крутящий момент, прилагаемый осью к колесу | Том | ||
| Вертикальное усилие, приложенное к колесу транспортным средством или подвеской | |||
|
|
| Тяговая потеря мощности | + My) | |
| Мощность сопротивления качению | Myλ | ||
| Мощность торможения | Mbrkλ | ||
| Потери на демпфирование при качении | bλ 2 | ||
| Мощность вертикального демпфирования | Fzbz˙ | ||
|
|
| Скорость изменения вертикальной кинетической энергии | ||
| Скорость изменения кинетической энергии вращения | |||
| Скорость изменения запасенной потенциальной энергии боковой стенки | |||
| Скорость изменения гравитационной потенциальной энергии | |||
Уравнения используют эти переменные.
| ω | Угловая скорость колеса |
| b | Компонент силы линейной скорости |
| Fx | Продольное усилие, создаваемое дорожным покрытием шины из-за проскальзывания |
| Fcp | Усилие скольжения шины на контактном участке |
| Fz | Нормальная сила транспортного средства |
| Fzb | Нормальная сила шины из-за демпфирования колеса |
| Fzk | Нормальная сила шины из-за жесткости колеса |
| Iyy | Инерция вращения колеса |
| Mbrk | Тормозной момент |
| Мой | Крутящий момент сопротивления качению |
| Ре | Эффективный радиус шины при нагрузке и при заданном давлении |
| T | Крутящий момент оси, приложенный к колесу |
| Vx | Скорость продольной оси |
Смещение, скорость и ускорение шины соответственно | |
| ω | Угловая скорость колеса |
Вертикальная скорость транспортного средства вдоль оси z, закрепленной на транспортном средстве |
BrkPrs - Тормозное давлениеscalarДавление тормозов, в Па.
Чтобы включить этот порт, для параметра Brake Type укажите один из следующих типов:
Disc
Drum
Mapped
AxlTrq - Крутящий момент осиscalarКрутящий момент оси, Та, вокруг оси вращения колеса, в Н· м.
Vx - СкоростьscalarПродольная скорость оси вдоль оси X транспортного средства (кузова), в м/с.
Fz - Нормальная силаscalarАбсолютное значение нормальной силы подвески или транспортного средства вдоль оси z, зафиксированной на кузове, в Н.
Gnd - Смещение грунтаscalarСмещение грунта, Grndz, вдоль отрицательной оси z, зафиксированной колесом, в м.
Создать Gnd:
Задать вертикальное движение как Mapped stiffness and damping.
На панели «Вертикаль» выберите «Input ground displacement».
lam_mux - Коэффициент масштабирования тренияscalarМасштабный коэффициент продольного трения, безразмерный.
Чтобы включить этот порт, выберите входной масштабный коэффициент трения.
TirePrs - Давление в шинахscalarДавление в шинах, в Па.
Чтобы включить этот порт:
Установите один из следующих параметров:
Продольная сила к Magic Formula pure longitudinal slip.
Сопротивление качению Pressure and velocity или Magic Formula.
Вертикальное перемещение в Mapped stiffness and damping.
На панели «Динамика колес» выберите «Входное давление шины».
Tamb - Температура окружающей средыscalarТемпература окружающей среды, Tamb, в К.
Чтобы включить этот порт:
Установить сопротивление качению в ISO 28580.
На панели Сопротивление качению (Rolling Resistance) выберите для ввода температуру окружающей среды.
Longitudinal Force - Выберите типMagic Formula constant value (по умолчанию) | Magic Formula pure longitudinal slip | Mapped forceБлок моделирует продольную силу как функцию проскальзывания колеса относительно поверхности дороги. Чтобы рассчитать продольную силу, задайте один из этих параметров.
| Настройка | Блокирование реализации |
|---|---|
|
|
Магическая формула с постоянным коэффициентом жесткости, формы, пика и кривизны. |
|
|
Магическая формула с зависимыми от нагрузки коэффициентами, которые реализуют уравнения 4.E9- 4.E18 в динамике шин и транспортных средств. |
|
|
Таблица поиска, которая является функцией нормального коэффициента силы и проскальзывания колеса. |
| Выбор | Включает эти параметры |
|---|---|
| Коэффициент чистого продольного пика, Dx Коэффициент чистой продольной формы, Cx Чистый коэффициент продольной жесткости, Bx Коэффициент чистой продольной кривизны, Ex |
| Коэффициент формы Cfx, PCX1 Продольное трение при номинальной нормальной нагрузке, PDX1 Изменение трения с нагрузкой, PDX2 Вариация трения с развалом, PDX3 Продольная кривизна при номинальной нормальной нагрузке, PEX1 Изменение коэффициента кривизны с нагрузкой, PEX2 Изменение коэффициента кривизны с квадратом нагрузки, PEX3 Коэффициент продольной кривизны с проскальзыванием, PEX4 Жесткость продольного скольжения при номинальной нормальной нагрузке, PKX1 Изменение жесткости скольжения с нагрузкой, PKX2 Коэффициент степени жесткости скольжения, PKX3 Горизонтальное смещение коэффициента проскальзывания при номинальной нормальной нагрузке, PHX1 Изменение коэффициента горизонтального проскальзывания с нагрузкой, PHX2 Вертикальное смещение нагрузки при номинальной нормальной нагрузке, PVX1 Изменение вертикального сдвига с нагрузкой, PVX2 Линейное изменение жесткости продольного скольжения при давлении в шине, PPX1 Квадратичное изменение жесткости продольного скольжения при давлении в шине, PPX2 Линейное изменение пикового продольного трения с давлением в шине, PPX3 Квадратичное изменение пикового продольного трения с давлением в шине, PPX4 Линейное изменение жесткости продольного скольжения при давлении в шине, PPX1 Коэффициент масштабирования функции спада скорости скольжения, lam_muV Коэффициент масштабирования жесткости при проскальзывании тормоза, lam_Kxkappa Коэффициент масштабирования продольной формы, lam_Cx Коэффициент масштабирования продольной кривизны, lam_Ex Коэффициент масштабирования продольного горизонтального сдвига, lam_Hx Коэффициент масштабирования продольного вертикального сдвига, lam_Vx |
| Контрольные точки коэффициента проскальзывания, kappaFx Нормальные силовые точки останова, FzFx Карта продольных сил, FxMap |
Rolling Resistance - Выберите типNone (по умолчанию) | Pressure and velocity | ISO 28580 | Magic Formula | Mapped torqueЧтобы рассчитать крутящий момент сопротивления качению, задайте один из этих параметров сопротивления качению.
| Настройка | Блокирование реализации |
|---|---|
| Ничего |
| Метод в методологии ступенчатого выбега для измерения сопротивления качению шины. Сопротивление качению является функцией давления в шине, нормальной силы и скорости. |
| Метод, указанный в ISO 28580:2018, Метод измерения сопротивления качению легковых автомобилей, грузовых автомобилей и шин - Испытание в одной точке и корреляция результатов измерений. |
| Уравнения магических формул из 4.E70 в Tire и Vehicle Dynamics. Магическая формула - эмпирическое уравнение, основанное на коэффициентах подгонки. |
| Таблица поиска, которая является функцией продольной скорости нормальной силы и оси вращения. |
| Выбор | Параметры |
|---|---|
| Коэффициент силы, независимый от скорости, aMy Компонент силы линейной скорости, bMy Компонент силы квадратичной скорости, cMy Показатель давления в шинах, alphaMy Показатель нормальной силы, betaMy |
| Сила паразитных потерь, Fpl Постоянная сопротивления качению, Cr Коэффициент термокоррекции, Кт Измеренная температура, Tmeas Сила паразитных потерь, Fpl Температура окружающей среды, Tamb |
| Коэффициент крутящего момента сопротивления качению, QSY Коэффициент сопротивления качению продольной силой, QSY2 Коэффициент сопротивления качению с линейной скоростью вращения, QSY3 Коэффициент сопротивления качению при скорости вращения в квадрате, QSY4 Крутящий момент сопротивления качению в квадрате, QSY5 Крутящий момент сопротивления качению в квадрате развала на основе нагрузки, QSY6 Нормальный коэффициент сопротивления качению под нагрузкой, QSY7 Коэффициент сопротивления качению под давлением, QSY8 Коэффициент масштабирования сопротивления качению, lam_My |
| Точки останова скорости по оси вращения, VxMy Нормальные силовые точки останова, FzMy Карта крутящего момента сопротивления качению, MyMap |
Brake Type - Выберите типNone | Disc | Drum | MappedСуществует четыре типа блоков продольных колес. Каждый блок реализует свой тип тормоза.
| Имя блока | Настройка типа тормоза | Внедрение тормозов |
|---|---|---|
| Продольное колесо - без тормоза |
|
Ничего |
| Продольное колесо - дисковый тормоз |
|
Тормоз, преобразующий давление тормозного цилиндра в тормозное усилие. |
| Продольное колесо - барабанный тормоз |
|
Симплексный барабанный тормоз, преобразующий приложенную силу и геометрию тормоза в чистый тормозной момент. |
| Продольное колесо - отображенный тормоз |
|
Таблица поиска, которая является функцией скорости колеса и приложенного тормозного давления. |
Vertical Motion - Выберите типNone (по умолчанию) | Mapped stiffness and dampingЧтобы рассчитать вертикальное движение, задайте один из этих параметров.
| Настройка | Блокирование реализации |
|---|---|
| Блок передает приложенные усилия шасси непосредственно на расчеты сопротивления качению и продольной силы. |
| Вертикальное движение зависит от жесткости и демпфирования колеса. Жесткость является функцией смещения боковой стенки шины и давления. Демпфирование является функцией скорости и давления боковой стенки шины. |
| Выбор | Включает эти параметры | Создает эти выходные порты |
|---|---|---|
| Колесная и неподрессоренная масса, м Начальное отклонение, zo Начальная скорость, zdoto Гравитационное ускорение, g Точки останова вертикального отклонения, zFz Точки останова давления, pFz Сила из-за отклонения, Fzz Точки останова вертикальной скорости, zdotFz Сила из-за скорости, Fzzdot Смещение грунта, Gndz Смещение входного заземления |
|
Longitudinal scaling factor, lam_x - Коэффициент масштабирования трения1 (по умолчанию)Масштабный коэффициент продольного трения, безразмерный.
Чтобы включить этот параметр, снимите флажок Масштабный коэффициент трения на входе (Input friction scale factor).
Input friction scale factor - ВыборOff (по умолчанию)Создайте входной порт для масштабного коэффициента продольного трения.
Выбор этого параметра:
Создание входного порта lam_mux.
Отключает параметр Коэффициент продольного масштабирования, lam_x.
Axle viscous damping coefficient, br - Демпфирование0.001 (по умолчанию) | scalarКоэффициент демпфирования вязкости оси, br, в Н· м· с/рад.
Wheel inertia, Iyy - Инерция0.8 (по умолчанию) | scalarИнерция колеса, в кг· м ^ 2.
Wheel initial angular velocity, omegao - Скорость колеса0 (по умолчанию) | scalarНачальная угловая скорость колеса вдоль неподвижной по телу оси y в рад/с.
Relaxation length, Lrel - Длина релаксации0.5 (по умолчанию) | scalarДлина релаксации колеса, в м.
Loaded radius, Re - Радиус нагрузки0.3 (по умолчанию) | scalarРадиус нагруженного колеса, Re, в м.
Unloaded radius, UNLOADED_RADIUS - Незагруженный радиус0.4 (по умолчанию) | scalarРадиус незагруженного колеса, в м.
Чтобы создать этот параметр, задайте для параметра Сопротивление качению значение Pressure and velocity или Magic Formula.
Nominal longitudinal speed, LONGVL - Скорость16 (по умолчанию) | scalarНоминальная продольная скорость вдоль закрепленной на корпусе оси х, в м/с.
Чтобы включить этот параметр, задайте для параметра Продольная сила значение Magic Formula pure longitudinal slip.
Nominal camber angle, gamma - Камбер0 (по умолчанию) | scalarНоминальный угол развала, в рад.
Чтобы включить этот параметр, установите один из следующих параметров:
Продольная сила к Magic Formula pure longitudinal slip.
Сопротивление качению Magic Formula.
Nominal pressure, NOMPRES - Давление220000 (по умолчанию) | scalarНоминальное давление, в Па
Чтобы включить этот параметр, установите один из следующих параметров:
Продольная сила к Magic Formula pure longitudinal slip.
Сопротивление качению Magic Formula.
Pressure, press - Давление220000 (по умолчанию) | scalarДавление, в Па.
Чтобы включить этот параметр:
Установите одно из следующих значений:
Продольная сила к Magic Formula pure longitudinal slip.
Сопротивление качению Pressure and velocity или Magic Formula.
Вертикальное перемещение в Mapped stiffness and damping.
На панели «Динамика колес» снимите флажок «Входное давление шины».
Pure longitudinal peak factor, Dx - Коэффициент1 (по умолчанию) | scalarЧистый продольный пиковый коэффициент, безразмерный.
Коэффициенты основаны на эмпирических данных шины. Эти значения являются типичными наборами постоянных коэффициентов магической формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухой тармак | 10 | 1.9 | 1 | 0.97 |
| Влажный тармак | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula constant value.
Pure longitudinal shape factor, Cx - Коэффициент1.65 (по умолчанию) | scalarЧистый продольный коэффициент формы, безразмерный.
Коэффициенты основаны на эмпирических данных шины. Эти значения являются типичными наборами постоянных коэффициентов магической формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухой тармак | 10 | 1.9 | 1 | 0.97 |
| Влажный тармак | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula constant value.
Pure longitudinal stiffness factor, Bx - Коэффициент10 (по умолчанию) | scalarЧистый коэффициент продольной жесткости, безразмерный.
Коэффициенты основаны на эмпирических данных шины. Эти значения являются типичными наборами постоянных коэффициентов магической формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухой тармак | 10 | 1.9 | 1 | 0.97 |
| Влажный тармак | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula constant value.
Pure longitudinal curvature factor, Ex - Коэффициент0.01 (по умолчанию) | scalarЧистый коэффициент продольной кривизны, безразмерный.
Коэффициенты основаны на эмпирических данных шины. Эти значения являются типичными наборами постоянных коэффициентов магической формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухой тармак | 10 | 1.9 | 1 | 0.97 |
| Влажный тармак | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula constant value.
Cfx shape factor, PCX1 - Коэффициент1.6 (по умолчанию) | scalarКоэффициент формы Cfx, PCX1, безразмерный.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal friction at nominal normal load, PDX1 - Коэффициент1 (по умолчанию) | scalarПродольное трение при номинальной нормальной нагрузке, PDX1, безразмерное.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Frictional variation with load, PDX2 - Коэффициент-0.08 (по умолчанию) | scalarВариация трения с нагрузкой, PDX2, безразмерность.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Frictional variation with camber, PDX3 - Коэффициент0 (по умолчанию) | scalarВариация трения с развалом, PDX3, 1/рад ^ 2.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal curvature at nominal normal load, PEX1 - Коэффициент0.112 (по умолчанию) | scalarПродольная кривизна при номинальной нормальной нагрузке, PEX1, безразмерная.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Variation of curvature factor with load, PEX2 - Коэффициент0.313 (по умолчанию) | scalarИзменение коэффициента кривизны с нагрузкой, PEX2, безразмерность.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Variation of curvature factor with square of load, PEX3 - Коэффициент0 (по умолчанию) | scalarИзменение коэффициента кривизны с квадратом нагрузки, PEX3, безразмерность.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal curvature factor with slip, PEX4 - Коэффициент0.0016 (по умолчанию) | scalarКоэффициент продольной кривизны с проскальзыванием, PEX4, безразмерность.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal slip stiffness at nominal normal load, PKX1 - Коэффициент21.7 (по умолчанию) | scalarЖесткость продольного скольжения при номинальной нормальной нагрузке, PKX1, безразмерная.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Variation of slip stiffness with load, PKX2 - Коэффициент13.77 (по умолчанию) | scalarИзменение жесткости скольжения с нагрузкой, PKX2, безразмерность.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Slip stiffness exponent factor, PKX3 - Коэффициент-0.412 (по умолчанию) | scalarКоэффициент степени жесткости проскальзывания, PKX3, безразмерность.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Horizontal shift in slip ratio at nominal normal load, PHX1 - Коэффициент2.1585E-4 (по умолчанию) | scalarГоризонтальное смещение коэффициента скольжения при номинальной нормальной нагрузке, PHX1, безразмерное.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Variation of horizontal slip ratio with load, PHX2 - Коэффициент0.00115 (по умолчанию) | scalarИзменение горизонтального отношения промаха с грузом, PHX2, безразмерным.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Vertical shift in load at nominal normal load, PVX1 - Коэффициент1.5973E-5 (по умолчанию) | scalarВертикальное изменение в грузе при номинальной нормальной нагрузке, PVX1, безразмерном.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Variation of vertical shift with load, PVX2 - Коэффициент1.043E-4 (по умолчанию) | scalarИзменение вертикального изменения с грузом, PVX2, безразмерным.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Linear variation of longitudinal slip stiffness with tire pressure, PPX1 - Коэффициент-0.3489 (по умолчанию) | scalarЛинейное изменение продольной жесткости промаха с давлением в шине, PPX1, безразмерным.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Quadratic variation of longitudinal slip stiffness with tire pressure, PPX2 - Коэффициент0.382 (по умолчанию) | scalarКвадратичное изменение жесткости продольного проскальзывания при давлении в шине, PPX2, безразмерном.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Linear variation of peak longitudinal friction with tire pressure, PPX3 - Коэффициент-0.09634 (по умолчанию) | scalarЛинейное изменение пикового продольного трения с давлением в шине, PPX3, безразмерным.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Quadratic variation of peak longitudinal friction with tire pressure, PPX4 - Коэффициент0.06447 (по умолчанию) | scalarКвадратное изменение пикового продольного трения с давлением в шине, PPX4, безразмерным.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Slip speed decay function scaling factor, lam_muV - Коэффициент1 (по умолчанию) | scalarМасштабный коэффициент функции спада скорости скольжения, lam_muV, безразмерный.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Brake slip stiffness scaling factor, lam_Kxkappa - Коэффициент1 (по умолчанию) | scalarМасштабный коэффициент жесткости при проскальзывании тормоза, lam_Kxkappa, безразмерный.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal shape scaling factor, lam_Cx - Коэффициент1 (по умолчанию) | scalarКоэффициент масштабирования продольной формы, lam_Cx, безразмерность.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal curvature scaling factor, lam_Ex - Коэффициент0 (по умолчанию) | scalarМасштабный коэффициент продольной кривизны, lam_Ex, безразмерный.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal horizontal shift scaling factor, lam_Hx - Коэффициент1 (по умолчанию) | scalarКоэффициент масштабирования продольного горизонтального сдвига, lam_Hx, безразмерный.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Longitudinal vertical shift scaling factor, lam_Vx - Коэффициент1 (по умолчанию) | scalarМасштабный коэффициент продольного вертикального сдвига, lam_Vx, безразмерный.
Для создания этого параметра выберите параметр «Продольная сила» Magic Formula pure longitudinal slip.
Slip ratio breakpoints, kappaFx - Точки остановаvectorКонтрольные точки коэффициента проскальзывания, безразмерные.
Для создания этого параметра выберите параметр «Продольная сила» Mapped force.
Normal force breakpoints, FzFx - Точки остановаvectorНормальные силовые точки останова, Н.
Для создания этого параметра выберите параметр «Продольная сила» Mapped force.
Longitudinal force map, FxMap - Таблица подстановкиarrayОтношение продольного усилия к проскальзыванию и нормальная сила, Н.
Для создания этого параметра выберите параметр «Продольная сила» Mapped force.
Velocity independent force coefficient, aMy - Коэффициент силы8e-4 (по умолчанию) | scalarКоэффициент силы, не зависящий от скорости, а, в с/м.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Linear velocity force component, bMy - Компонент силы.001 (по умолчанию) | scalarКомпонент силы линейной скорости, b, в с/м.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Quadratic velocity force component, cMy - Компонент силы1.6e-4 (по умолчанию) | scalarКомпонент силы квадратичной скорости, c, в с ^ 2/м ^ 2.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Tire pressure exponent, alphaMy - Показатель давления-0.003 (по умолчанию) | scalarПоказатель давления в шинах, ɑ, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Normal force exponent, betaMy - Показатель силы0.97 (по умолчанию) | scalarНормальная экспонента силы, β, безразмерность.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Pressure and velocity.
Parasitic losses force, Fpl - Потеря силы10 (по умолчанию) | scalarПаразитная потеря силы, Fpl, у N.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Rolling resistance constant, Cr - Константа1e-3 (по умолчанию) | scalarПостоянная сопротивления качению, Cr, в Н/кН. ISO 28580 определяет единицу сопротивления качению как один ньютон тягового сопротивления для каждого килоньютона нормальной нагрузки.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Thermal correction factor, Kt - Поправочный коэффициент.008 (по умолчанию) | scalarКоэффициент термокоррекции, Kt, в 1/degC.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Measured temperature, Tmeas - Температура298.15 (по умолчанию) | scalarИзмеренная температура, Tmeas, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Ambient temperature, Tamb - Температура298.15 (по умолчанию) | scalarИзмеренная температура, Tamb, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Input ambient temperature - Выборoff (по умолчанию) | onВыберите для создания входного порта Tamb.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Rolling resistance torque coefficient, QSY1 - Коэффициент крутящего момента0.007 (по умолчанию) | scalarКоэффициент крутящего момента сопротивления качению безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Longitudinal force rolling resistance coefficient, QSY2 - Коэффициент сопротивления усилия0 (по умолчанию) | scalarКоэффициент сопротивления качению продольной силы, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Linear rotational speed rolling resistance coefficient, QSY3 - Коэффициент линейной скорости0.0015 (по умолчанию) | scalarКоэффициент сопротивления качению с линейной скоростью вращения, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Quartic rotational speed rolling resistance coefficient, QSY4 - Коэффициент квартической скорости8.5e-05 (по умолчанию) | scalarКоэффициент сопротивления качению с квартальной скоростью вращения, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Camber squared rolling resistance torque, QSY5 - Крутящий момент сопротивления развала0 (по умолчанию) | scalarВращающий момент сопротивления качению в квадрате, в 1/рад ^ 2.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Load based camber squared rolling resistance torque, QSY6 - Крутящий момент сопротивления нагрузке0 (по умолчанию) | scalarКрутящий момент сопротивления качению в квадрате развала на основе нагрузки, в 1/рад ^ 2.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Normal load rolling resistance coefficient, QSY7 - Нормальный коэффициент сопротивления0.9 (по умолчанию) | scalarНормальный коэффициент сопротивления качению при нагрузке, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Pressure load rolling resistance coefficient, QSY8 - Коэффициент сопротивления давлению-0.4 (по умолчанию) | scalarКоэффициент сопротивления качению под давлением, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Rolling resistance scaling factor, lam_My - Масштаб1 (по умолчанию) | scalarМасштабный коэффициент сопротивления качению, безразмерный.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Magic Formula.
Spin axis velocity breakpoints, VxMy - Точки останова-20:1:20 (по умолчанию) | vectorТочки останова скорости по оси вращения, в м/с.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Mapped torque.
Normal force breakpoints, FzMy - Точки останова0:200:1e4 (по умолчанию) | vectorНормальные силовые точки останова, в Н.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Mapped torque.
Rolling resistance torque map, MyMap - Таблица подстановкиarrayКрутящий момент сопротивления качению в зависимости от частоты вращения оси и нормальной силы в Н· м.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). Mapped torque.
Static friction coefficient, mu_static - Статическое трение.3 (по умолчанию) | scalarКоэффициент статического трения, безразмерный.
Чтобы включить этот параметр, для параметра «Тип тормоза» укажите один из следующих типов:
Disc
Drum
Mapped
Kinetic friction coefficient, mu_kinetic - Кинетическое трение.2 (по умолчанию) | scalarКоэффициент кинематического трения, безразмерный.
Чтобы включить этот параметр, для параметра «Тип тормоза» укажите один из следующих типов:
Disc
Drum
Mapped
Disc brake actuator bore, disc_abore - Расстояние ствола.05 (по умолчанию) | scalarОтверстие привода дискового тормоза, в м.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Brake pad mean radius, Rm - Радиус.177 (по умолчанию) | scalarСредний радиус тормозной колодки, в м.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Number of brake pads, num_pads - Подсчет2 (по умолчанию) | scalarКоличество тормозных колодок.
Для включения параметров дискового тормоза выберите Disc для параметра «Тип тормоза».
Drum brake actuator bore, disc_abore - Расстояние ствола0.0508 (по умолчанию) | scalarОтверстие привода тормоза барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to drum center distance, drum_a - Расстояние0.123 (по умолчанию) | scalarРасстояние от штифта до центра барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin center to force application point distance, drum_c - Расстояние0.212 (по умолчанию) | scalarЦентр штифта колодки для приложения усилия к расстоянию точки приложения, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Drum internal radius, drum_r - Радиус0.15 (по умолчанию) | scalarВнутренний радиус барабана, в м.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to pad start angle, drum_theta1 - Угол0 (по умолчанию) | scalarШтифт колодки - начальный угол в град.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Shoe pin to pad end angle, drum_theta2 - Угол126 (по умолчанию) | scalarШтифт башмака к торцу прокладки, в град.
Для включения параметров барабанного тормоза выберите Drum для параметра «Тип тормоза».
Brake actuator pressure breakpoints, brake_p_bpt - Точки остановаvectorТочки останова тормозного привода, бар.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Wheel speed breakpoints, brake_n_bpt - Точки остановаvectorТочки останова колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Brake torque map, f_brake_t - Таблица подстановкиarrayСправочная таблица для тормозного момента, N), является функцией приложенного тормозного давления и скорости колеса, где:
T - тормозной момент в Н· м.
Р - давление торможения, в бар.
N - частота вращения колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра «Тип тормоза».
Nominal normal force, FNOMIN - Сила2000 (по умолчанию) | scalarНоминальная номинальная нагрузка на колесо по оси Z, в Н.
Чтобы включить этот параметр, установите один из следующих параметров:
Продольная сила к Magic Formula pure longitudinal slip.
Сопротивление качению Magic Formula.
Nominal rated load scaling factor, lam_Fzo - Коэффициент1 (по умолчанию) | scalarНоминальный коэффициент масштабирования нагрузки, безразмерный. Используется для масштабирования нормы для конкретных приложений и условий нагрузки.
Чтобы включить этот параметр, задайте для параметра Продольная сила значение Magic Formula pure longitudinal slip.
Wheel and unsprung mass, m - Масса10 (по умолчанию) | scalarКолесная и неподрессоренная масса, в кг. Используется в вычислениях вертикального движения.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Initial deflection, zo - Отклонение0 (по умолчанию) | scalarНачальное перемещение оси вдоль оси z, закрепленной на колесе, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Initial velocity, zdoto - Скорость0 (по умолчанию) | scalarНачальная скорость оси вдоль оси z, зафиксированной колесом, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Gravitational acceleration, g - Гравитация9.81 (по умолчанию) | scalarГравитационное ускорение, в м/с ^ 2.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Ground displacement, Gndz - Смещение0 (по умолчанию) | scalarСмещение грунта, Grndz, вдоль отрицательной оси z, зафиксированной колесом, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Vertical deflection breakpoints, zFz - Точки останова[0 .01 .1] (по умолчанию) | vectorВектор точек останова боковины, соответствующих таблице сил, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Pressure breakpoints, pFz - Точки останова[10000 1000000] (по умолчанию) | vectorВектор точек данных давления, соответствующих таблице сил, в Па.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Force due to deflection, Fzz - Сила[0 1e3 1e4; 0 1e4 1e5] (по умолчанию) | vectorУсилие, обусловленное отклонением боковой стенки и давлением вдоль оси Z, закрепленной на колесе, в Н.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Vertical velocity breakpoints, zdotFz - Точки останова[-20 0 20] (по умолчанию) | scalarВектор точек останова скорости боковой стенки, соответствующий силе, обусловленной таблицей скоростей, в м.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Force due to velocity, Fzzdot - Сила[500 0 -500;250 0 -250] (по умолчанию) | arrayСила, обусловленная скоростью боковой стенки и давлением вдоль оси Z, закрепленной на колесе, в Н.
Чтобы включить этот параметр, задайте для параметра «Вертикальное движение» значение Mapped stiffness and damping.
Minimum normal force, FZMIN - Сила0 (по умолчанию) | scalarМинимальная нормальная сила, в Н. Используется для всех расчетов вертикальной силы.
Maximum normal force, FZMAX - Сила10000 (по умолчанию) | scalarМаксимальная нормальная сила, в Н. Используется для всех расчетов вертикальной силы.
Max allowable slip ratio (absolute), kappamax - Коэффициент1.5 (по умолчанию) | scalarМаксимально допустимый абсолютный коэффициент проскальзывания, безразмерный.
Velocity tolerance used to handle low velocity situations, VXLOW - Допуск1 (по умолчанию) | scalarДопуск скорости, используемый для обработки низкоскоростных ситуаций, в м/с.
Minimum ambient temperature, TMIN - Тмин0 (по умолчанию) | scalarМинимальная температура окружающей среды, TMIN, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
Maximum ambient temperature, TMAX - Tmax400 (по умолчанию) | scalarМаксимальная температура окружающей среды, TMAX, в К.
Чтобы создать этот параметр, выберите параметр Сопротивление качению (Rolling Resistance). ISO 28580.
[1] Комитет по автомобильным шинам. Пошаговая методика измерения сопротивления качению шин. Стандартные J2452_199906. Уоррендейл, Пенсильвания: SAE International, июнь 1999 года.
[2] Pacejka, H.B. Tire and Vehicle Dynamics. 3-й ред. Оксфорд, Великобритания: SAE and Butterworth-Heinemann, 2012.
[3] Шмид, Стивен Р., Бернард Дж. Хамрок и Бо О. Якобсон. «Глава 18: Тормоза и сцепления». Основы элементов машины, версия SI. 3-я ред. Бока Ратон, ФЛ: КПР Пресс, 2014.
[4] Шигли, Джозеф Э. и Ларри Митчел. Проектирование машиностроения. 4-й ред. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1983.
[5] ISO 28580:2018. Метод измерения сопротивления качению легковых автомобилей, грузовых автомобилей и шин - испытание в одной точке и корреляция результатов измерений. ИСО (Международная организация по стандартизации), 2018 год.
