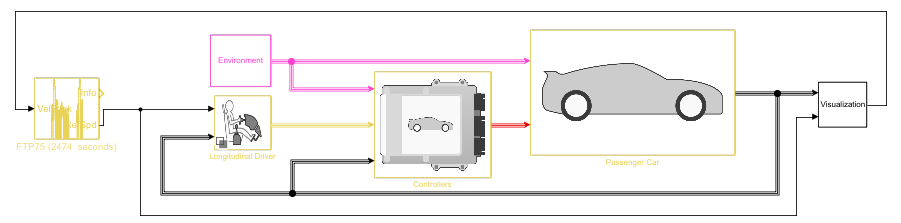
В этом примере показано, как использовать блок «Источник цикла привода» для идентификации сбоев цикла привода при запуске обычного приложения ссылки на транспортное средство с помощью FTP–75 цикл привода.
Откройте обычный проект эталонного применения транспортного средства. По умолчанию приложение имеет FTP–75 цикл диска с отключенным отслеживанием ошибок.
Откройте блок «Источник цикла привода». На вкладке Fault Tracking выберите следующие параметры:
Включить отслеживание отказов
Включить отслеживание сбоев
Проверьте параметры, определяющие условия отказа и отказа. Если скорость транспортного средства не находится в пределах допустимого диапазона скоростей в течение допуска по времени, блок устанавливает состояние неисправности. Примите настройки параметров управления динамометром EPA по умолчанию, нажав кнопку ОК.
В этой таблице приведены настройки стандарта EPA и Всемирной согласованной процедуры испытаний легких транспортных средств (ВПИМ).
| Параметр | Описание | Настройка | |
|---|---|---|---|
EPA Standard1 | Tests2 WLTP | ||
Допуск скорости | Допуск по скорости выше самой высокой точки и ниже самой низкой точки следа скорости цикла привода в пределах допуска по времени. | 2,0 миль/ч | 2,0 км/ч |
Допуск по времени | Время, которое блок использует для определения допуска скорости. | 1,0 с | 1,0 с |
| Максимальное количество отказов | Максимальное количество отказов во время цикла диска. | Не указано | 10 |
| Максимальное время единичного отказа | Максимальная продолжительность отказа. | 2,0 с | 1,0 с |
| Максимальное общее время отказа | Максимальное накопленное время, затраченное при состоянии неисправности. | Не указано | Не указано |
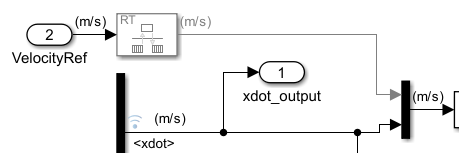
Подключите сигнал продольной скорости транспортного средства к блоку источника ездового цикла VelFdbk входной порт.
В подсистеме визуализации подключите сигнал продольной скорости, <xdot>, к исходящему порту с именем xdot_output.
Определите <xdot> сигнальные блоки. Для отображения единиц измерения сигнала на вкладке «Отладка» выберите «Информационные наложения» > «Единицы измерения». <xdot> единицы сигнала - м/с.
Выберите <xdot> сигнальная линия и Enable Data Logging.
На верхнем уровне модели подключите вывод «Визуализация» к входу блока «Источник цикла привода».
Подключите блок источника цикла привода Info порт вывода в порт терминатора. Включить ведение журнала данных.
Сохраните модель и запустите моделирование.
Для проверки результатов используйте Инспектор данных. На панели инструментов Simulink ® на вкладке Моделирование в разделе Просмотр результатов выберите Инспектор данных .
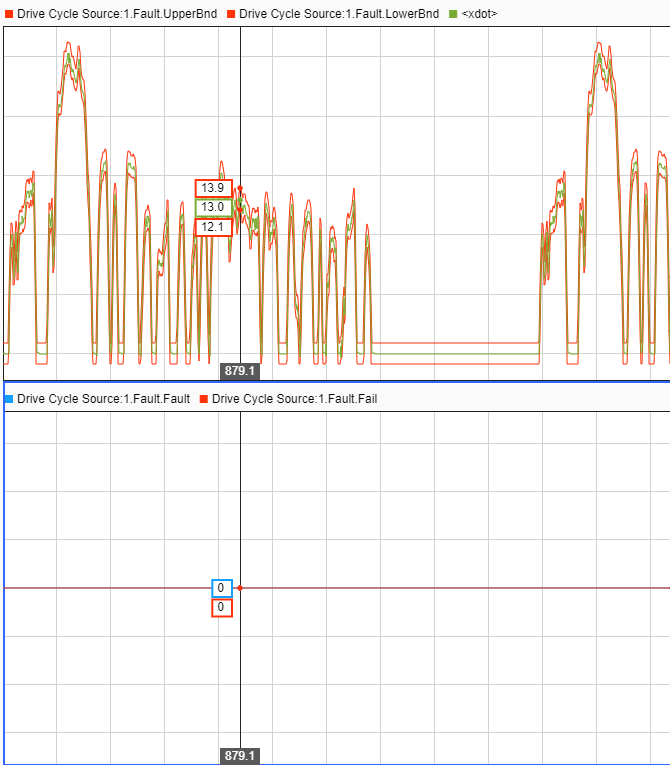
Эти результаты показывают, что блок источника цикла диска не обнаружил ошибок или сбоев во время цикла диска.
Fault - скорость транспортного средства, <xdot>, находился в пределах верхнего и нижнего пределов допустимого диапазона скоростей.
Fail - Условия отказа не превышали максимальное количество отказов, максимальное время единичного отказа или максимальное общее время отказа.
В блоке «Источник цикла привода» установите для параметра «Допуск скорости» более жесткий допуск, например 1 миль в час. Блок вычисляет новые границы ошибок для скорости.
Повторно запустите моделирование.
Для проверки результатов используйте Инспектор данных. Эти результаты показывают, что блок источника цикла диска обнаружил ошибки и отказы во время цикла диска.
Fault - скорость транспортного средства, <xdot>, не находился в пределах верхнего и нижнего пределов допустимого диапазона скоростей.
Fail - Условия отказа превысили максимальное количество отказов, максимальное время единичного отказа или максимальное общее время отказа.

[1] Агентство по охране окружающей среды (АООС). График движения городского динамометра EPA. 40 CFR 86.115-78, 1 июля 2001 г.
[2] Комиссия Европейского союза. «Допуски трассировки скорости». Регламент Комиссии Европейского союза. 32017R1151, с. 1.2.6.6, 1 июня 2017 г.
