Компенсация дисбаланса ввода/вывода
IQImbalanceCompensator Система object™ компенсирует дисбаланс между синфазной и квадратурной составляющими модулированного сигнала.
Для компенсации дисбаланса ввода/вывода:
Определение и настройка IQImbalanceCompensator объект. См. раздел Строительство.
Звонить step для компенсации дисбаланса I/Q в соответствии со свойствами comm.IQImbalanceCompensator. Поведение step относится к каждому объекту на панели инструментов.
Адаптивный алгоритм, присущий компенсатору дисбаланса I/Q, совместим со схемами модуляции M-PSK, M-QAM и OFDM, где M > 2.
Примечание
Выходной сигнал компенсатора может быть масштабирован и повернут, то есть умножен на комплексное число, относительно опорной совокупности. На практике это не является проблемой, поскольку приемники исправляют это перед демодуляцией посредством использования оценки канала.
Примечание
Начиная с R2016b, вместо использования step для выполнения операции, определенной системным object™, можно вызвать объект с аргументами, как если бы это была функция. Например, y = step(obj,x) и y = obj(x) выполнять эквивалентные операции.
H = comm.IQImbalanceCompensator создает объект compensator System, H, что компенсирует дисбаланс между синфазной и квадратурной составляющими входного сигнала.
H = comm.IQImbalanceCompensator( создает объект компенсатора дисбаланса I/Q, Name,Value)H, с каждым указанным свойством Name установить в указанное значение Value. Можно указать дополнительные аргументы пары имя-значение в любом порядке как (Name1,Value1,...,NameN,ValueN).
|
Источник коэффициентов компенсатора Укажите либо |
|
Начальный коэффициент, используемый для компенсации дисбаланса I/Q Начальный коэффициент - это комплексный скаляр, который может быть либо одинарной, либо двойной точностью. Значение по умолчанию: |
|
Источник размера шага для адаптации коэффициента Укажите либо |
|
Размер шага адаптации Задает размер шага, используемый алгоритмом при оценке дисбаланса ввода/вывода. Это свойство доступно только в том случае, если |
|
Создает входной порт для управления адаптацией коэффициентов компенсатора Когда это логическое свойство имеет значение |
|
Создание порта для вывода коэффициентов компенсатора Когда это логическое свойство имеет значение |
| шаг | Компенсация дисбаланса I/Q |
| Общие для всех системных объектов | |
|---|---|
release | Разрешить изменение значения свойства объекта системы |
reset | Сброс внутренних состояний объекта System |
При использовании resetэтот способ сбрасывает подоконный суффикс с последнего символа в ранее обработанном кадре.
Смягчить влияние амплитудного и фазового дисбаланса на QPSK-модулированный сигнал с помощью объекта comm.IQImbalureCompensator System?.
Создайте объект диаграммы созвездий. Укажите пары имя-значение, чтобы на диаграмме созвездия отображались только последние 100 символов данных.
constDiagram = comm.ConstellationDiagram(... 'SymbolsToDisplaySource','Property', ... 'SymbolsToDisplay',100);
Создайте компенсатор дисбаланса ввода/вывода.
iqImbComp = comm.IQImbalanceCompensator;
Формирование случайных символов данных и применение модуляции QPSK.
data = randi([0 3],1e7,1); txSig = pskmod(data,4,pi/4);
Примените к передаваемому сигналу амплитудный и фазовый дисбаланс.
ampImb = 5; % dB phImb = 15; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Постройте график созвездия принятого сигнала. Обратите внимание, что принятый сигнал испытывал амплитудный и фазовый сдвиг.
constDiagram(rxSig)

Примените алгоритм компенсации I/Q и просмотрите совокупность. Скомпенсированная совокупность сигналов почти выровнена с опорной совокупностью.
compSig = iqImbComp(rxSig); constDiagram(compSig)

Скомпенсировать амплитудный и фазовый дисбаланс в 8-PSK сигнале с помощью comm.IQImbalanceCompensator object™ системы с внешними коэффициентами.
Создание модулятора 8-PSK и диаграммы созвездий Системные объекты. Используйте пары «имя-значение», чтобы убедиться, что на диаграмме созвездия отображаются только последние 100 символов данных, и предоставить эталонное созвездие.
hMod = comm.PSKModulator(8); refC = constellation(hMod); hScope = comm.ConstellationDiagram(... 'SymbolsToDisplaySource','Property', ... 'SymbolsToDisplay',100, ... 'ReferenceConstellation',refC);
Создайте объект компенсатора дисбаланса I/Q с входным портом для коэффициентов алгоритма.
hIQComp = comm.IQImbalanceCompensator('CoefficientSource','Input port');
Генерировать случайные символы данных и применять 8-PSK модуляцию.
data = randi([0 7],1000,1); txSig = step(hMod,data);
Примените к передаваемому сигналу амплитудный и фазовый дисбаланс.
ampImb = 5; % dB phImb = 15; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Постройте график созвездия принятого сигнала. Обратите внимание, что принятый сигнал испытывал амплитудный и фазовый сдвиг.
step(hScope,rxSig);

Используйте iqimbal2coef функция определения коэффициента компенсации, заданного амплитудным и фазовым дисбалансом.
compCoef = iqimbal2coef(ampImb,phImb);
Примените коэффициент компенсации к принятому сигналу с помощью step функции comm.IQImbalanceCompensator и просмотрите результирующее созвездие. Можно видеть, что скомпенсированная группировка сигналов теперь почти выровнена с опорной.
compSig = step(hIQComp,rxSig,compCoef); step(hScope,compSig)

Удалите дисбаланс I/Q из 64-QAM сигнала и сделайте оцененные коэффициенты доступными извне, установив размер шага алгоритма из входного порта.
Создайте объект диаграммы созвездий. Используйте пары имя-значение, чтобы убедиться, что диаграмма созвездия отображает только последние 256 символов данных, задайте пределы осей и укажите ссылочное созвездие.
M = 64; refC = qammod(0:M-1,M); constDiagram = comm.ConstellationDiagram(... 'SymbolsToDisplaySource','Property', ... 'SymbolsToDisplay',256, ... 'XLimits',[-10 10],'YLimits',[-10 10], ... 'ReferenceConstellation',refC);
Создайте системный объект компенсатора дисбаланса I/Q, в котором размер шага задается в качестве входного аргумента, а оценочные коэффициенты становятся доступными через выходной порт.
iqImbComp = comm.IQImbalanceCompensator('StepSizeSource','Input port', ... 'CoefficientOutputPort',true);
Генерировать случайные символы данных и применять 64-QAM модуляцию.
nSym = 25000; data = randi([0 M-1],nSym,1); txSig = qammod(data,M);
Примените к передаваемому сигналу амплитудный и фазовый дисбаланс.
ampImb = 2; % dB phImb = 10; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Постройте график созвездия принятого сигнала.
constDiagram(rxSig);

Укажите параметр размера шага для компенсатора дисбаланса I/Q.
stepSize = 1e-5;
Компенсируйте дисбаланс I/Q при установке размера шага с помощью входного аргумента. Можно видеть, что скомпенсированная группировка сигналов теперь почти выровнена с опорной.
[compSig,estCoef] = iqImbComp(rxSig,stepSize); constDiagram(compSig)

Постройте график действительных и мнимых значений оценочных коэффициентов. Видно, что они достигают стационарного решения.
plot((1:nSym)'/1000,[real(estCoef),imag(estCoef)]) grid xlabel('Symbols (thousands)') ylabel('Coefficient Value') legend('Real','Imag','location','best')

Управление алгоритмом адаптации компенсатора дисбаланса I/Q с помощью внешнего аргумента.
Применение модуляции QPSK к символам случайных данных.
data = randi([0 3],600,1);
txSig = pskmod(data,4,pi/4,'gray');Создайте компенсатор дисбаланса I/Q, в котором алгоритм адаптации управляется через входной порт, размер шага задается через StepSize и оценочные коэффициенты становятся доступными через выходной порт.
iqImbComp = comm.IQImbalanceCompensator('AdaptInputPort',true, ... 'StepSize',0.001,'CoefficientOutputPort',true);
Примените к передаваемому сигналу амплитудный и фазовый дисбаланс.
ampImb = 5; % dB phImb = 15; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Разбейте операцию компенсации на три сегмента, в которых компенсатор включен для первых 200 символов, отключен для следующих 200 символов и включен для последних 200 символов. Сохраните данные коэффициента в трех векторах.
[~,estCoef1] = iqImbComp(rxSig(1:200),true); [~,estCoef2] = iqImbComp(rxSig(201:400),false); [~,estCoef3] = iqImbComp(rxSig(401:600),true);
Объедините коэффициенты комплексного алгоритма и постройте график их действительной и мнимой частей.
estCoef = [estCoef1; estCoef2; estCoef3]; plot((1:600)',[real(estCoef) imag(estCoef)]) grid xlabel('Symbols') ylabel('Coefficient Value') legend('Real','Imaginary','location','best')

Обратите внимание, что коэффициенты не адаптируются во время отключения компенсатора.
Одним из основных нарушений, влияющих на приемники прямого преобразования, является дисбаланс между синфазной и квадратурной составляющими принимаемого сигнала. Вместо того, чтобы улучшать аналоговое аппаратное обеспечение переднего плана, более эффективно с точки зрения затрат выдерживать определенный уровень дисбаланса I/Q и затем внедрять методы компенсации. Алгоритм слепой компенсации на основе округлости используется в качестве основы для компенсатора дисбаланса I/Q.
Показана обобщенная модель дисбаланса I/Q, где g - амплитудный дисбаланс, а λ - фазовый дисбаланс (в идеале, g = 1 и λ = 0). На чертеже H (f) - номинальная частотная характеристика ветвей, обусловленная, например, фильтрами нижних частот. HI (f) и HQ (f) представляют части синфазных и квадратурных амплитудных и фазовых откликов, которые отличаются от номинального отклика. При полном совпадении HI (f) = HQ (f) = 1.
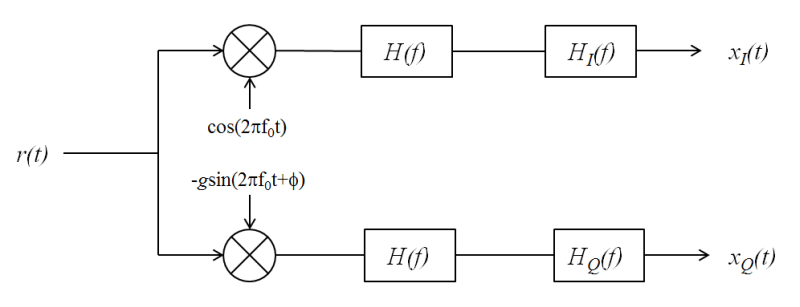
Пусть z (t) - идеальный эквивалентный сигнал основной полосы принимаемого сигнала r (t), где его преобразование Фурье обозначается как Z (f). Учитывая обобщенную модель дисбаланса I/Q, преобразование Фурье несбалансированного сигнала, x (t) = xI (t) + xQ (t), равно
(f) Z * (− f)
где G1 (f) и G2 (f) являются прямыми и сопряженными компонентами I/Q дисбаланса. Эти компоненты определяются как
HQ (f) gexp (jstart) ]/2
Применяя обратное преобразование Фурье к X (f), модель сигнала становится x (t) = g1 (t) * z (t) + g2 (t) * z * (t).
Это предполагает структуру компенсатора, как показано, в которой дискретно-временная нотация используется для выражения переменных. Компенсированный сигнал выражается как y (n) = x (n) + wx * (n).
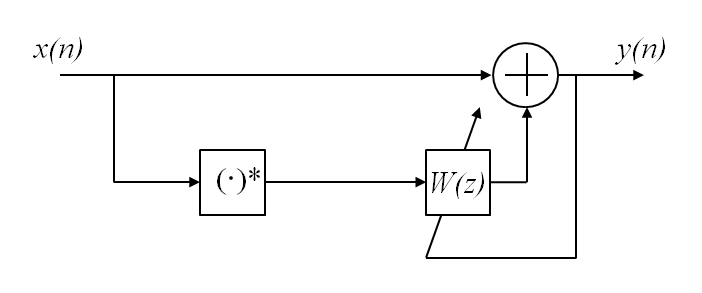
Простой алгоритм формы
1) = w (n) − My2 (n)
используется для определения весов, поскольку обеспечивает «правильный» выход, то есть = 0 [1]. Начальное значение w определяется по InitialCoefficient свойство, которое имеет значение по умолчанию 0 + 0i. M - размер шага, как указано в StepSize собственность.
[1] Анттила, Л., М. Валкама и М. Ренфорс. «Слепая компенсация частотно-селективных дисбалансов I/Q в квадратурных радиоприемниках: Подход на основе круговой полярности», Proc. IEEE ICASSP, pp.III-245-248, 2007.
[2] Kiayani, A., L. Anttila, Y. Zou и M. Valkama, «Advanced Receiver Design for Competing Multiple RF Displements in OFDM Systems: Algorithms and RF Measurements», Журнал электротехнической и компьютерной инженерии, том. 2012.
