В этом примере показано, как настроить ПИД-контроллер, чтобы уменьшить перегрузку в контрольном отслеживании или улучшить отклонение возмущений на входе установки. Используя приложение PID Tuner, пример иллюстрирует компромисс между эталонным отслеживанием и эффективностью нарушения-отклонения в системах управления PI и PID.
В этом примере завод представлен как модель LTI. Для получения информации об использовании PID-тюнера для настройки блока PID-контроллера в модели Simulink ® см. раздел Настройка PID-контроллера в пользу отслеживания ссылок или отклонения нарушений (Simulink Control Design).
Рассмотрим систему управления, приведенную на следующем рисунке.
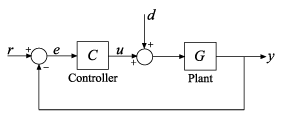
Завод в этом примере:
0 .1с.
Опорное трекинг - это отклик у на сигналы r. Отклонение возмущений является мерой подавления при у сигналов при d. При использовании PID-тюнера для настройки контроллера можно настроить конструкцию в пользу отслеживания ссылок или отклонения нарушений, как того требует приложение.
Наличие начальной конструкции контроллера обеспечивает базовую линию, с которой можно сравнивать результаты при настройке PI-контроллера. Создание начального проекта контроллера PI для установки с помощью команды настройки PID pidtune.
G = tf(0.3,[1,0.1,0]); % plant model C = pidtune(G,'PI');
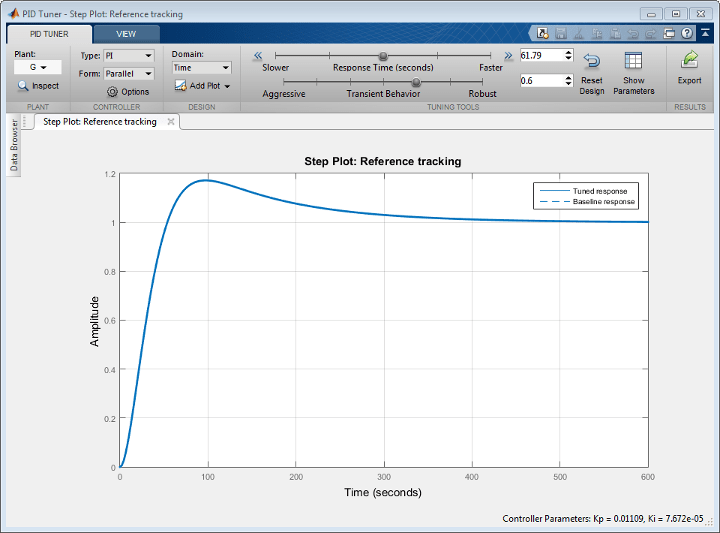
Откройте PID-тюнер с помощью первоначальной конструкции контроллера.
pidTuner(G,C)
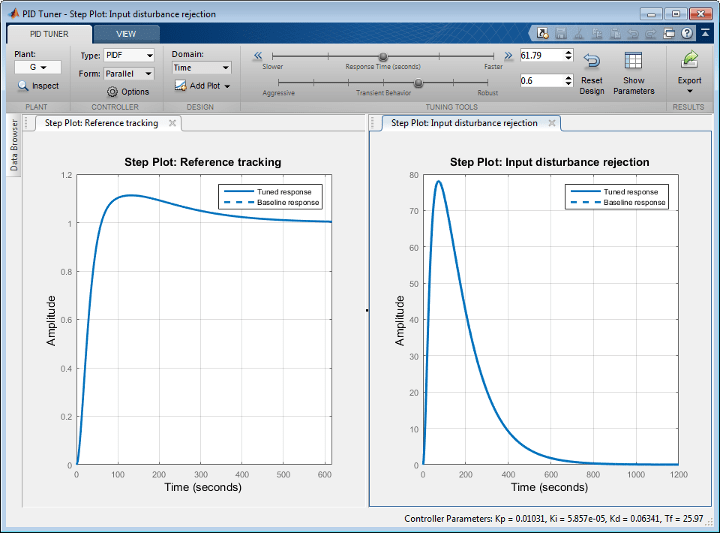
Добавьте график ответа на шаг отклонения входного возмущения. Выберите «Добавить график» > «Отклонение нарушения ввода».
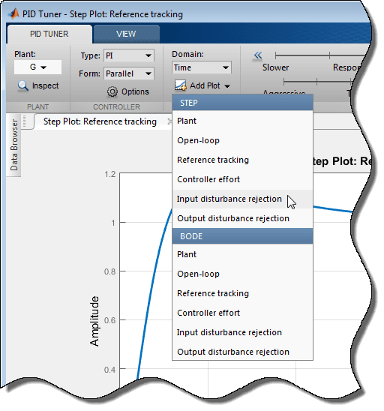
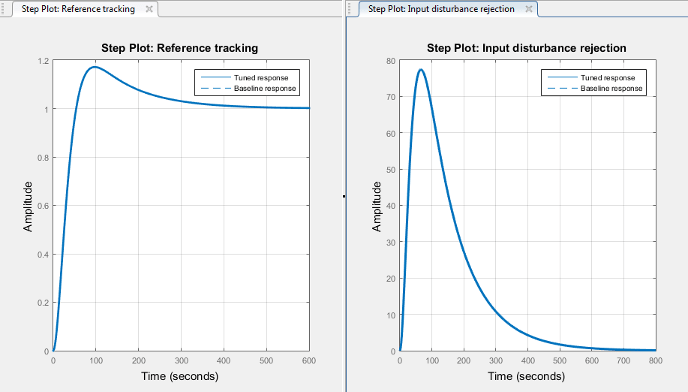
PID-тюнер накладывает график отклонения-возмущения бок о бок с графиком отслеживания ссылок.
Совет
Используйте опции на вкладке «Вид», чтобы изменить способ отображения нескольких графиков в PID-тюнере.
По умолчанию для заданной полосы пропускания и запаса фазы PID-тюнер настраивает контроллер для достижения баланса между отслеживанием опорного сигнала и отклонением возмущений. В этом случае контроллер выдает некоторый избыточный сигнал в ответе отслеживания опорного сигнала. Контроллер также подавляет входное возмущение с более длительным временем установки, чем опорное отслеживание, после начального пика.
В зависимости от приложения может потребоваться изменить баланс между отслеживанием ссылок и отклонением возмущений в пользу одного или другого. Для PI-контроллера можно изменить этот баланс с помощью ползунка Переходное поведение (Transient Behavior). Переместите ползунок влево, чтобы улучшить отклонение возмущений. Ответы с первоначальным дизайном контроллера теперь отображаются как Baseline response (пунктирная линия).
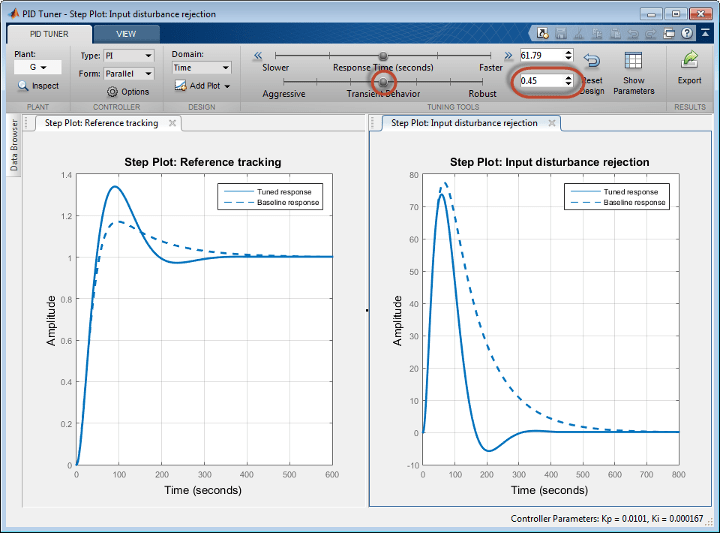
Снижение коэффициента переходного поведения до 0,45 ускоряет отбраковку возмущений, но также увеличивает перерасход в отклике опорного отслеживания.
Совет
Щелкните правой кнопкой мыши график отслеживания ссылок и выберите Характеристики (Characteristics) > Пиковый отклик (Peak Response), чтобы получить численное значение превышения.
Переместите ползунок «Переходное поведение» вправо до тех пор, пока не будет минимизировано превышение в отклике отслеживания привязок.
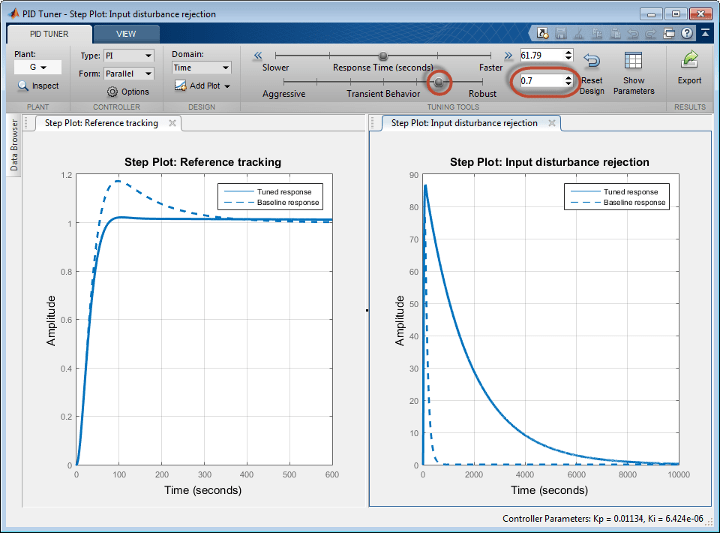
Увеличение коэффициента переходного поведения до 0,70 почти устраняет перерасход, но приводит к крайне вялому отклонению возмущения. Можно попытаться переместить ползунок «Переходное поведение» до тех пор, пока не будет найден баланс между отслеживанием ссылок и отклонением возмущений, подходящий для приложения. Влияние изменения ползунка на баланс зависит от модели завода. Для некоторых моделей растений эффект не так велик, как показано в этом примере.
До сих пор время срабатывания системы управления оставалось фиксированным при изменении коэффициента переходного режима. Эти операции эквивалентны фиксации полосы пропускания и изменению целевого минимального запаса фазы системы. Если требуется зафиксировать как полосу пропускания, так и целевой диапазон фаз, можно изменить баланс между отслеживанием ссылок и отклонением возмущений. Для настройки контроллера, способствующего отклонению возмущений или отслеживанию ссылок, необходимо изменить направление проектирования алгоритма настройки PID.
Изменение проектного фокуса PID-тюнера более эффективно, чем больше перестраиваемых параметров в системе управления. Поэтому он не оказывает большого влияния при использовании с ПИ-контроллером. Чтобы увидеть его эффект, измените тип контроллера на PIDF. В меню «Тип» выберите PIDF.
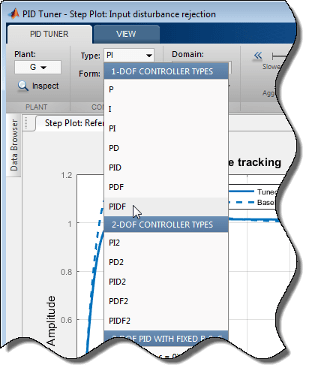
PID-тюнер автоматически проектирует контроллер нового типа, PIDF. Переместите ползунок Переходное поведение (Transient Behavior), чтобы установить коэффициент обратно равным 0,6.
Сохраните эту новую конструкцию в качестве базовой, щелкнув стрелку Экспорт![]() (Export) и выбрав
(Export) и выбрав Save as Baseline.
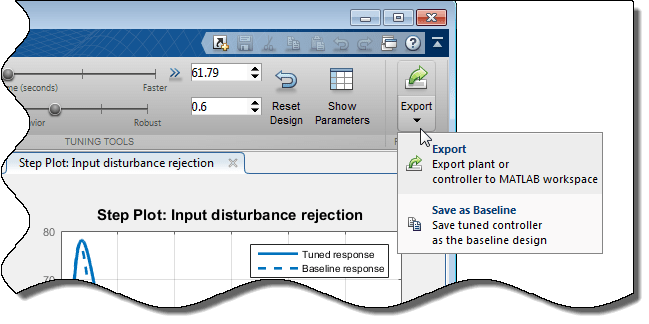
Проект PIDF заменяет исходный проект PI в качестве базового графика.
Как и в случае PI, первоначальный проект PIDF балансирует отслеживание ссылок и отклонение возмущений. Также, как и в случае PI, контроллер выдает некоторое превышение в отклике опорного отслеживания и подавляет входное возмущение с аналогичным временем установки.
Измените фокус конструкции PID Tuner в пользу отслеживания ссылок без изменения времени отклика или коэффициента переходного поведения. Для этого нажмите «Параметры![]() » и в меню «Фокус» выберите
» и в меню «Фокус» выберите Reference tracking.
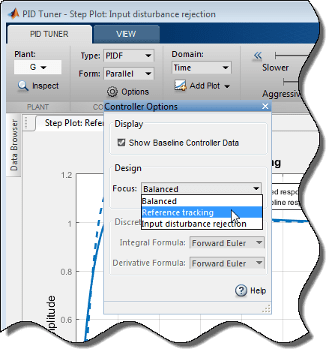
PID-тюнер автоматически перенастраивает коэффициенты контроллера с акцентом на производительность отслеживания ссылок.
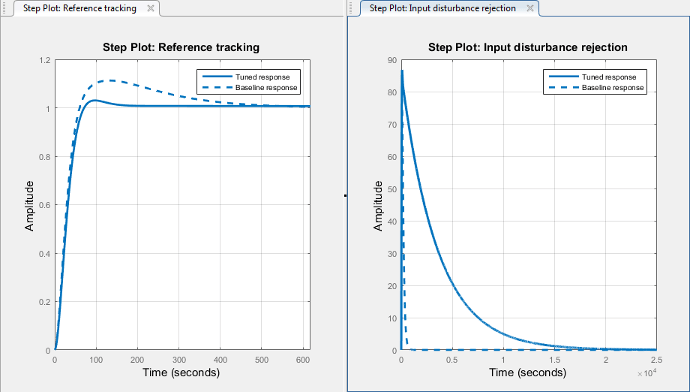
Контроллер PIDF, настроенный с фокусом отслеживания ссылок, отображается как Tuned response (сплошная линия). Графики показывают, что результирующий контроллер отслеживает эталонный ввод со значительно меньшим превышением и более быстрым временем установки, чем сбалансированная конструкция контроллера. Однако конструкция приводит к гораздо худшему отказу от нарушения.
Измените фокус конструкции в пользу отклонения возмущения. В![]() диалоговом окне «Параметры» в меню «Фокус» выберите
диалоговом окне «Параметры» в меню «Фокус» выберите Input disturbance rejection.
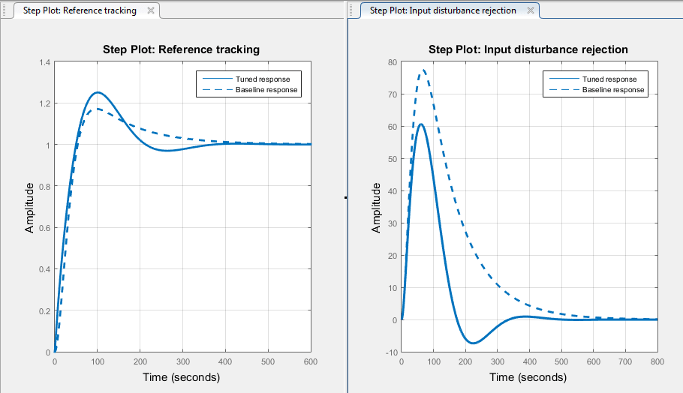
Эта конструкция контроллера приводит к улучшенному отклонению возмущений, но приводит к некоторым увеличенным превышениям в отклике эталонного отслеживания.
При использовании опции фокусировки конструкции можно настроить ползунок «Переходное поведение» для дальнейшей точной настройки баланса между двумя показателями производительности. Используйте фокус проектирования и ползунки вместе, чтобы достичь баланса производительности, который наилучшим образом соответствует вашим требованиям к дизайну. Влияние такой точной настройки на производительность системы сильно зависит от свойств вашего завода. Для некоторых растений перемещение ползунка «Переходное поведение» (Transient Behavior) или изменение параметра «Фокус» (Focus) практически не влияет.
