looptune настраивает цикл обратной связи, показанный ниже, в соответствии с заданными требованиями по умолчанию.
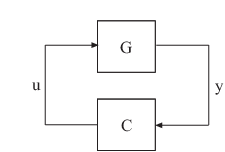
C представляет контроллер и G представляет растение. Выходы датчика y (сигналы измерения) и выходы исполнительного механизма u (управляющие сигналы) определяют границу между установкой и контроллером. Контроллер является частью вашей системы управления, входами которой являются измерения, а выходами - управляющие сигналы. И наоборот, установка является оставшейся частью вашей системы управления, которая принимает управляющие сигналы в качестве входов и производит измерения в качестве выходов.
Например, в системе управления, показанной на следующем рисунке, контроллер C получает измерение yи опорный сигнал r. Контроллер создает элементы управления qL и qV в качестве выходных данных.
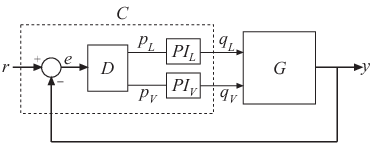
Диспетчер C имеет фиксированную внутреннюю структуру. C включает в себя матрицу усиления D , контроллеры PI PI_L и PI_Vи суммирующее соединение. looptune команда настраивает свободные параметры C такие как выигрыш в D и пропорциональные и интегральные коэффициенты усиления PI_L и PI_V. Также можно использовать looptune для совместной настройки свободных параметров в обоих C и G.
