Тюнер системы управления позволяет настроить систему управления, имеющую любую архитектуру. Архитектура системы управления определяет способ взаимодействия контроллеров с контролируемой системой. Архитектура включает настраиваемые элементы управления вашей системы, дополнительные компоненты фильтров и датчиков, управляемую систему и взаимосвязи между всеми этими элементами. Например, общая архитектура системы управления представляет собой одноконтурную конфигурацию обратной связи, показанную на следующем рисунке:
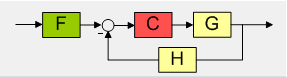
G - модель установки, а H - динамика датчика. Обычно это фиксированные компоненты системы управления. Предварительный фильтр F и контроллер обратной связи C являются перестраиваемыми элементами. Поскольку системы управления так удобно выражены в этой блок-схеме, эти элементы называются фиксированными блоками и перестраиваемыми блоками.
Тюнер системы управления предоставляет несколько способов определения архитектуры системы управления:
Используйте предопределенную структуру обратной связи на иллюстрации.
Моделирование любой архитектуры системы управления в MATLAB ® путем построения обобщенного состояния-пространства (genss) модель из фиксированных компонентов LTI и настраиваемых блоков управления.
Смоделировать систему управления в Simulink ® и указать блоки для настройки в настройщике системы управления (требуется программное обеспечение Simulink Control Design™).
Если на следующем рисунке система управления имеет одноконтурную конфигурацию обратной связи, используйте предварительно определенную структуру обратной связи, встроенную в тюнер системы управления.
Например, предположим, что у вас есть двигатель постоянного тока, для которого требуется настроить ПИД-контроллер. Реакция двигателя моделируется как G (s) = 1/( s + 1) 2. Создайте фиксированную модель LTI, представляющую завод, и настраиваемую модель контроллера PID.
Gmot = zpk([],[-1,-1],1); Cmot = tunablePID('Cmot','PID');
Открыть тюнер системы управления.
controlSystemTuner
Откроется программа настройки системы управления, настроенная для настройки архитектуры по умолчанию. Затем укажите значения блоков в архитектуре. Щелкните![]() , чтобы открыть диалоговое окно «Стандартная конфигурация обратной связи».
, чтобы открыть диалоговое окно «Стандартная конфигурация обратной связи».
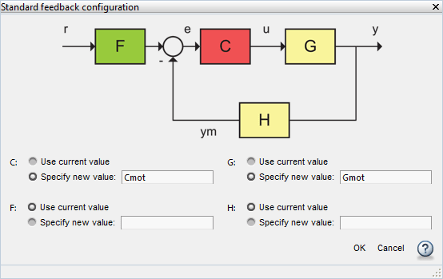
Введите созданные значения для C и G. Модуль настройки системы управления считывает эти значения из рабочей области MATLAB. Нажмите кнопку ОК.
Значением по умолчанию для динамики датчика является фиксированная передаточная функция с единичным коэффициентом усиления. Значением по умолчанию для фильтра F является настраиваемый блок усиления.
Теперь можно выбирать блоки для настройки, создавать цели настройки и настраивать систему управления.
Если архитектура управления не соответствует предопределенной архитектуре управления тюнера системы управления, можно создать обобщенное состояние-пространство (genss) модель с настраиваемыми компонентами, представляющими элементы контроллера. Например, предположим, что требуется настроить каскадную систему управления на следующем рисунке, которая включает два настраиваемых контроллера PID.
.
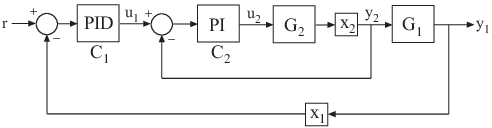
Создание настраиваемых блоков управления для контроллеров и фиксированных моделей LTI для компонентов завода, G1 и G2. Также в комплект поставки входят необязательные расположения размыкания контура x1 и x2. Эти расположения указывают, где можно открыть петли или ввести сигналы для указания требований к настройке системы.
G2 = zpk([],-2,3); G1 = zpk([],[-1 -1 -1],10); C20 = tunablePID('C2','pi'); C10 = tunablePID('C1','pid'); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2');
Подключите эти компоненты для построения модели всей системы управления с замкнутым контуром.
InnerLoop = feedback(X2*G2*C20,1); CL0 = feedback(G1*InnerLoop*C10,X1); CL0.InputName = 'r'; CL0.OutputName = 'y';
CL0 является настраиваемым genss модель. Указание имен каналов ввода и вывода позволяет идентифицировать их при определении требований к настройке системы.
Откройте программу настройки системы управления, чтобы настроить эту модель.
controlSystemTuner(CL0)
Теперь можно выбирать блоки для настройки, создавать цели настройки и настраивать систему управления.
При наличии программного обеспечения Simulink Control Design можно моделировать произвольную архитектуру системы управления в модели Simulink и настраивать модель в настройщике системы управления.
См. раздел Настройка открытой системы управления для настройки модели Simulink.
