Лидар Toolbox™ использует следующие системы координат:
Word - фиксированная универсальная система координат, в которой существуют физические датчики.
Сенсор - для каждого конкретного сенсора, например, лидарного сенсора или камеры.
Пространственный (Spatial) - зависит от изображения, снятого камерой. Местоположения в пространственных координатах выражаются в пикселях.
Узор - шахматная система координат, обычно используемая для калибровки датчиков камеры.
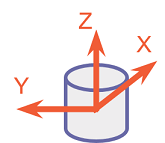
Мировая система координат - это фиксированная универсальная система, которая работает как абсолютная опорная для всех датчиков. В Lidar Toolbox используется правая декартова мировая система координат, определенная в ISO 8855, где положительная ось Z указывает вверх от земли. Единицы в метрах.
Система координат датчика в Lidar Toolbox привязана к определенному датчику, такому как лидарный датчик или камера. Местоположение каждого датчика содержит начало координат его системы координат. Например, оптический центр камеры обычно действует как начало системы координат камеры. Точки в системе координат датчика следуют следующим соглашениям по осям:
Ось X указывает вперед от датчика.
Ось Y указывает влево, если смотреть вперед.
Ось Z указывает вверх от земли для поддержания правой системы координат.
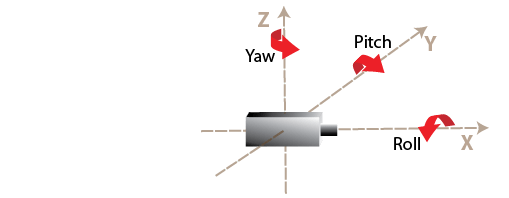
Углы рыскания, тангажа и крена датчиков соответствуют стандарту ISO. Эти углы являются положительными по часовой стрелке при взгляде в положительном направлении осей z-, y- и x соответственно.
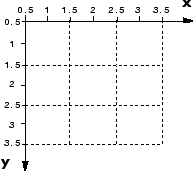
Пространственные координаты позволяют задать местоположение на изображении с большей детализацией, чем координаты пикселей. В системе координат пикселя каждый пиксель обрабатывается как дискретная единица, однозначно идентифицируемая целочисленной парой строк и столбцов, такой как (3,4). В пространственной системе координат местоположения в изображении представлены в виде частичных пикселей, таких как (3.3,4,7).
 Дополнительные сведения о пространственной системе координат см. в разделе Пространственные координаты.
Дополнительные сведения о пространственной системе координат см. в разделе Пространственные координаты.
Обычным способом оценки параметров датчика монокулярной камеры является калибровка камеры с использованием множества изображений калибровочного шаблона, такого как шашечная доска. В системе координат массива (XP, YP) ось XP указывает вправо, а ось YP - вниз. Начало координат шашки - нижний правый угол верхнего левого квадрата шашки.
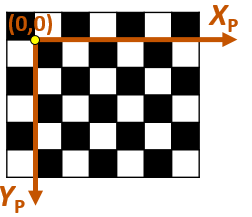
Каждый угол средства проверки представляет одну точку в системе координат. Например, угол справа от начала координат равен (1,0), а угол ниже начала координат равен (0,1). Дополнительные сведения о калибровке камеры с помощью шахматного рисунка см. в разделе Калибровка монокулярной камеры (Automated Driving Toolbox).
