Расположение на изображениях можно задать с помощью различных систем координат. Системы координат используются для размещения элементов относительно друг друга. Координаты в пиксельной и пространственной системах координат относятся к местоположениям на изображении. Координаты в 3-D системах координат описывают 3-D расположение и начало координат системы.
Координаты пикселей позволяют задавать местоположения на изображениях. В пиксельной системе координат изображение обрабатывается как сетка дискретных элементов, упорядоченных сверху вниз и слева направо.
![]()
Для координат пикселей число строк, r, вниз, в то время как число столбцов, c, увеличивается вправо. Координаты пикселей представляют собой целочисленные значения и находятся в диапазоне от 1 до длины строки или столбца. Координаты пикселей, используемые в программном обеспечении Computer Vision Toolbox™, являются едиными и соответствуют координатам пикселей, используемым в системах обработки изображений Toolbox™ и MATLAB ®. Дополнительные сведения о системе координат пикселей см. в разделе Индексы пикселей.
Пространственные координаты позволяют задать местоположение на изображении с большей детализацией, чем координаты пикселей. Например, в системе координат пикселя пиксель обрабатывается как дискретная единица, однозначно идентифицируемая целочисленной парой строк и столбцов, такой как (3,4). В пространственной системе координат местоположения в изображении представлены в виде частичных пикселей, таких как (3.3, 4.7).
Дополнительные сведения о пространственной системе координат см. в разделе Пространственные координаты.
При реконструкции сцены 3-D можно определить результирующие точки 3-D в одной из двух систем координат. В системе координат на основе камеры точки определяются относительно центра камеры. В системе координат на основе шаблона калибровки точки определяются относительно точки в сцене.
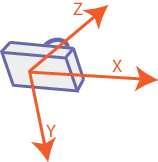
В функциях Computer Vision Toolbox используется правая мировая система координат. В этой системе ось X указывает вправо, ось Y - вниз, а ось Z - от камеры. Для отображения точек 3-D используйте команду pcshow.
Точки, представленные в системе координат на основе камеры, описываются с началом координат, расположенным в оптическом центре камеры.
В стереосистеме начало координат расположено в оптическом центре Камеры 1.
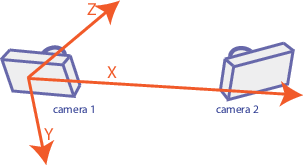
При реконструкции сцены 3-D с помощью калиброванной стереокамеры reconstructScene и triangulate функция возвращает 3-D точки с началом координат в оптическом центре камеры 1. При использовании изображений Kinect ® pcfromkinect функция возвращает 3-D точки с началом координат в центре камеры RGB.
Точки, представленные в системе координат на основе калибровочного шаблона, описаны с началом координат, расположенным в (0,0) местоположении калибровочного шаблона.
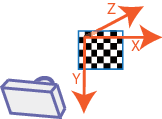
При реконструкции сцены 3-D из нескольких видов, содержащих калибровочный массив, результирующие точки 3-D определяются в системе координат на основе массива. Пример «Структура из движения из двух видов» показывает, как восстановить сцену 3-D из пары 2-D изображений, содержащих шахматный узор.
