Продукт LTE Toolbox™ обеспечивает набор моделей каналов для тестирования и проверки передачи и приема радиосвязи UE и eNireB, как определено в [1] и [2]. В продукте LTE Toolbox доступны следующие модели каналов.
Условия распространения многолучевого замирания
Условия движения высокоскоростных поездов
Условия перемещения распространения
Модель канала многолучевого замирания определяет следующие три профиля задержки.
Модель расширенного пешехода A (EPA)
Расширенная модель транспортного средства A (EVA)
Расширенная типовая городская модель (ETU)
Эти три профиля задержки представляют среду с низким, средним и высоким разбросом задержек соответственно. Профили задержки многолучевого распространения для этих каналов показаны в следующих таблицах.
Профиль задержки EPA
| Избыточная задержка отвода (ns) | Относительная мощность (дБ) |
|---|---|
| 0 | 0.0 |
| 30 | –1.0 |
| 70 | –2.0 |
| 90 | –3.0 |
| 110 | –8.0 |
| 190 | –17.2 |
| 410 | –20.8 |
Профиль задержки EVA
| Избыточная задержка отвода (ns) | Относительная мощность (дБ) |
|---|---|
| 0 | 0.0 |
| 30 | –1.5 |
| 150 | –1.4 |
| 310 | –3.6 |
| 370 | –0.6 |
| 710 | –9.1 |
| 1090 | –7.0 |
| 1730 | –12.0 |
| 2510 | –16.9 |
Профиль задержки ETU
| Избыточная задержка отвода (ns) | Относительная мощность (дБ) |
|---|---|
| 0 | –1.0 |
| 50 | –1.0 |
| 120 | –1.0 |
| 200 | 0.0 |
| 230 | 0.0 |
| 500 | 0.0 |
| 1600 | –3.0 |
| 2300 | –5.0 |
| 5000 | –7.0 |
Все отводы в предыдущих таблицах имеют классический доплеровский спектр. В дополнение к профилю задержки многолучевого распространения задают максимальную доплеровскую частоту для каждого условия распространения многолучевого распространения, как показано в следующей таблице.
| Модель канала | Максимальная доплеровская частота |
|---|---|
| EPA 5Hz | 5 Гц |
| EVA 5Hz | 5 Гц |
| EVA 70Hz | 70 Гц |
| 70Hz ETU | 70 Гц |
| 300Hz ETU | 300 Гц |
В случае сред MIMO вводится набор корреляционных матриц для моделирования корреляции между антеннами UE и eNireB. Эти матрицы корреляции вводятся в матрицы корреляции канала MIMO.
Состояние высокоскоростного поезда определяет канал распространения без замирания с одним многолучевым компонентом, положение которого фиксируется во времени. Этот единственный многолучевой сигнал представляет доплеровский сдвиг, который вызывается высокоскоростным поездом, движущимся мимо базовой станции, как показано на следующем рисунке.
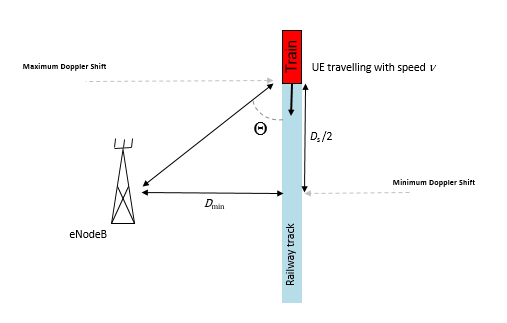
Выражение является начальным расстоянием поезда от eNireB, а - минимальным расстоянием между eNireB и железнодорожным полотном. Обе переменные измеряются в метрах. Переменным,, является скорость поезда в метрах в секунду. Доплеровский сдвиг из-за движущейся последовательности приведен в следующем уравнении.
t)
Переменная ) является доплеровским сдвигом, а fd - максимальной доплеровской частотой. Косинус угла (задается следующим уравнением.
2,0≤t≤Ds/v
2,Ds/v<t≤2Ds/v
2Ds/v
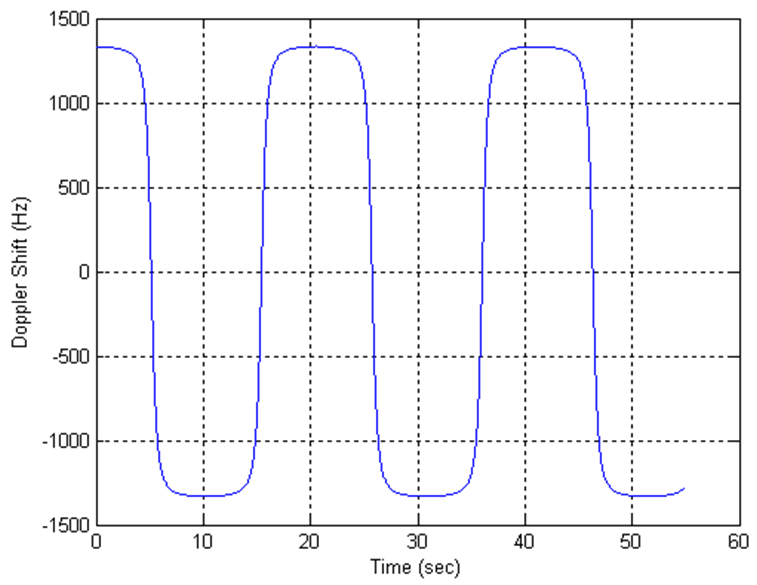
Для тестирования eNireB определены два сценария высокоскоростных поездов, в которых используются параметры, перечисленные в следующей таблице. Доплеровский сдвиг, ), вычисляется с использованием предшествующих уравнений и параметров, перечисленных в следующей таблице.
| Параметр | Стоимость | |
|---|---|---|
| Сценарий 1 | Сценарий 3 | |
| 1000 м | 300 м | |
| 50 м | 2 м | |
| ν | 350 км/ч | 300 км/кр |
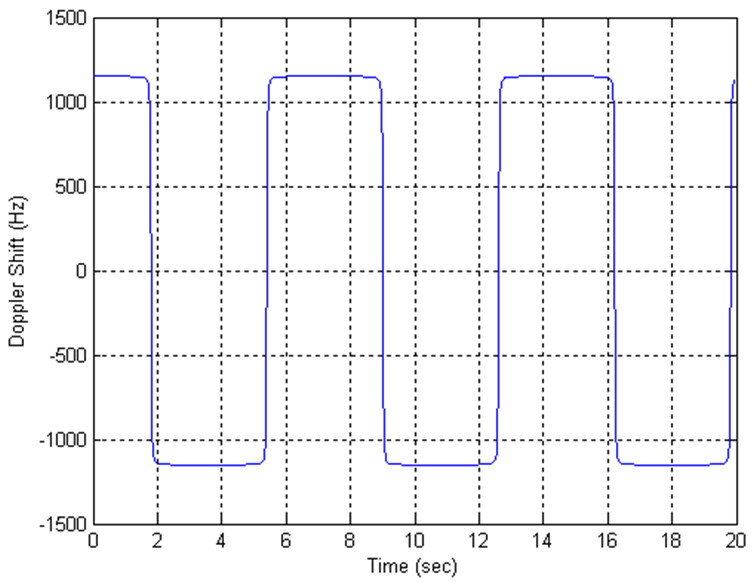
| 1,340 Гц | 1150 Гц | |
Оба этих сценария приводят к доплеровским сдвигам, которые применяются ко всем полосам частот. Траектория доплеровского сдвига для сценария 1 показана на следующем рисунке.
Траектория доплеровского сдвига для сценария 3 показана на следующем рисунке.
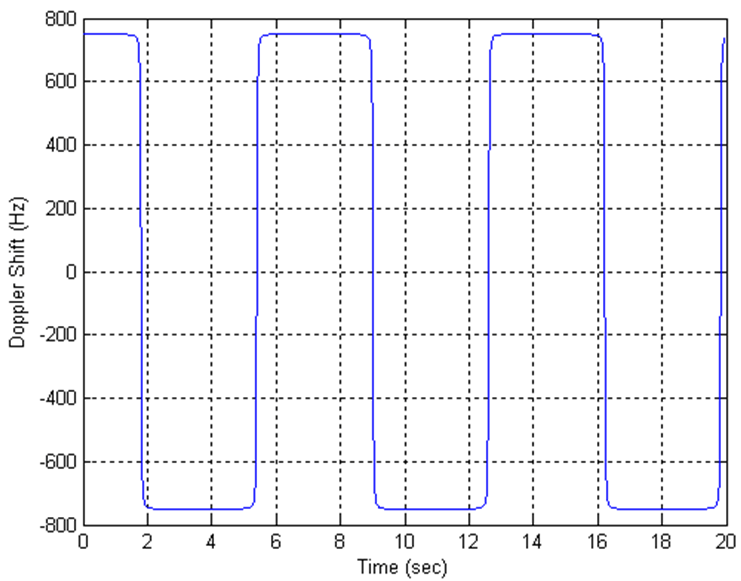
Для тестирования UE доплеровский сдвиг ) вычисляется с использованием предшествующих уравнений и параметров, перечисленных в следующей таблице.
| Параметр | Стоимость |
|---|---|
| 300 м | |
| 2 м | |
| ν | 300 км/ч |
| 750 Гц |
Эти параметры приводят к доплеровскому сдвигу, применяемому ко всем полосам частот, показанным на следующем рисунке.
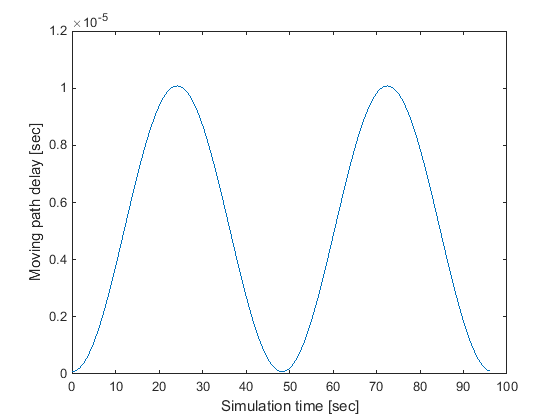
Подвижный канал распространения в LTE определяет состояние канала, в котором изменяется местоположение компонентов многолучевого распространения. Разность во времени между опорным временем и первым отводом Δ, задается следующим уравнением.
)
Переменная А представляет начальное время в секундах, а Δλ представляет угловое вращение в радианах в секунду.
Примечание
Относительное время между компонентами многолучевого распространения остается фиксированным.
Параметры условий движущегося распространения показаны в следующей таблице.
| Параметр | Сценарий 1 | Сценарий 2 |
|---|---|---|
| Модель канала | ETU200 | AWGN |
| Скорость UE | 120 км/ч | 350 км/ч |
| Длина КП | Нормальный | Нормальный |
| A | 10 мкс | 10 мкс |
| Δω | 0,04 с-1 | 0,13 с-1 |
Доплеровский сдвиг применяется только для генерации выборок замирания для сценария 1. В сценарии 2 моделируется один компонент многолучевого распространения без замирания с добавочным белым гауссовым шумом (AWGN). Местоположение этого компонента многолучевого распространения изменяется со временем согласно предыдущему уравнению.
Пример движущегося канала с одним не замирающим краном показан на следующем рисунке.
В системах MIMO существует корреляция между передающей и приемной антеннами. Это зависит от ряда факторов, таких как разделение между антенной и несущей частотой. Для максимальной пропускной способности желательно минимизировать корреляцию между передающей и приемной антеннами.
Существует несколько способов моделирования корреляции антенн. Один способ использует корреляционные матрицы для описания корреляции между множеством антенн как в передатчике, так и в приемнике. Эти матрицы вычисляются независимо как в передатчике-приемнике, так и затем объединяются посредством произведения Кронекера для того, чтобы сформировать матрицу пространственной корреляции канала.
Три различных уровня корреляции определены в [1].
низкая или отсутствие корреляции
средняя корреляция
высокая корреляция
Параметры α и β определены для каждого уровня корреляции, как показано в следующей таблице значений корреляции.
| Низкая корреляция | Средняя корреляция | Высокая корреляция | |||
|---|---|---|---|---|---|
| α | β | α | β | α | β |
| 0 | 0 | 0.3 | 0.9 | 0.9 | 0.9 |
Независимые корреляционные матрицы в eNireB и UE, ReNB и RUE, соответственно, показаны для различных наборов антенн (1, 2 и 4) в следующей таблице.
| Корреляция | Одна антенна | Две антенны | Четыре антенны |
|---|---|---|---|
| eNodeB | 1 | α49 * α19 * 1) | |
| UE | 1 | β49 * β19 * 1) |
Матрица пространственной корреляции канала, Rspat, задается следующим уравнением.
Символ ⊗ представляет продукт Кронекера. Значения матрицы пространственной корреляции канала Rspat для различных размеров матрицы определены в следующей таблице.
| Размер матрицы | Значения Rspat |
|---|---|
| 1 × 2 случай | 1ββ * 1) |
| 2 × 2 случай | α * β1βα * β * α * β * 1) |
| 4 × 2 случай | * 1) ⊗ (1ββ * 1) |
| 4 × 4 случай | β19 * 1β19β * β49 * β19 * 1) |
[1] 3GPP TS 36.101. "Развитый универсальный наземный радиодоступа (E-UTRA); Пользовательское оборудование (UE), радиопередача и прием. "Проект партнерства 3-го поколения; Техническая спецификация на сеть радиодоступа группы. URL: https://www.3gpp.org.
[2] 3GPP TS 36.104. "Развитый универсальный наземный радиодоступа (E-UTRA); базовая станция (BS) радиопередача и прием. "Проект партнерства 3-го поколения; Техническая спецификация на сеть радиодоступа группы. URL: https://www.3gpp.org.
lteFadingChannel | lteHSTChannel | lteMovingChannel
