Системы координат представляют положение на Земле с помощью координат. Функции картографирования Toolbox™ преобразуют координаты между земно-центрированными земно-фиксированными (ECEF), геодезическими системами, системами «восток-север-вверх» (RUS), «север-восток-вниз» (NED) и системами «азимут-высотный диапазон» (AER).
Глобальные системы, такие как ECEF и геодезические системы, описывают положение объекта с помощью триплета координат. Локальные системы, такие как системы RUS, NED и AER, требуют двух триплетов координат: один триплет описывает местоположение начала координат, а другой триплет описывает местоположение объекта относительно начала координат.
При работе с 3-D системами координат необходимо указать эллипсоидную модель, аппроксимирующую форму Земли. Дополнительные сведения о эллипсоидных моделях см. в разделе Справочные сфероиды. Все координаты образца на этой странице используют Всемирную геодезическую систему 1984 года (WGS84).
Система с земной привязкой (ECEF) использует декартовы координаты (X, Y, Z) для представления положения относительно центра опорного эллипсоида. Расстояние между центром эллипсоида и центром Земли зависит от опорного эллипсоида.
Положительная ось X пересекает поверхность эллипсоида при 0 ° широты и 0 ° долготы, где экватор встречается с простым меридианом.
Положительная ось Y пересекает поверхность эллипсоида при 0 ° широты и 90 ° долготы.
Положительная ось Z пересекает поверхность эллипсоида на 90 ° широты и 0 ° долготы, Северного полюса.
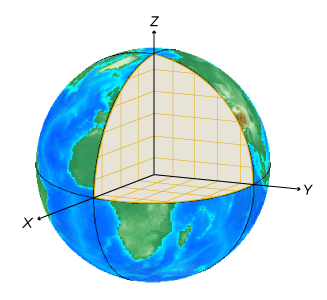
Например, координаты ECEF Parc des Buttes-Chaumont (4198945 м, 174747 м, 4781887 м).
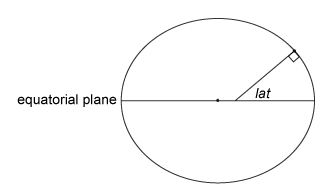
Геодезическая система использует координаты (lat, lon, h) для представления положения относительно опорного эллипсоида.
лат, широта, берёт начало на экваторе. Более конкретно, широта точки - это угол, нормаль к эллипсоиду в этой точке составляет с экваториальной плоскостью, которая содержит центр и экватор эллипсоида. Угол широты находится в диапазоне [-90 °, 90 °]. Положительные широты соответствуют северным, а отрицательные - южным.
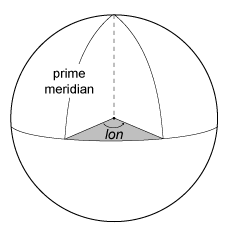
лон, долгота, берёт начало у простого меридиана. Более конкретно, долгота точки - это угол, который плоскость, содержащая центр эллипсоида и меридиан, содержащий эту точку, образует с плоскостью, содержащей центр эллипсоида и простой меридиан. Положительные долготы измеряются в направлении против часовой стрелки от точки обзора над Северным полюсом. Обычно долгота находится в диапазоне [-180 °, 180 °] или [0 °, 360 °].
h, эллипсоидальная высота, измеряется вдоль нормали эталонного сфероида. Функции преобразования координат, такие как geodetic2ecef требуется указать h в тех же единицах измерения, что и ссылочный эллипсоид. Единицы измерения эллипсоида привязки можно изменить с помощью команды LengthUnit собственность. Модели местности обычно предоставляют данные с использованием ортометрической высоты, а не эллипсоидальной высоты. Сведения о расчете эллипсоидальной высоты по ортометрической высоте см. в разделе Поиск эллипсоидальной высоты по ортометрической и геоидальной высоте.
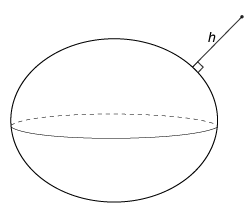
Например, геодезические координаты Parc des Buttes-Chaumont составляют (48,8800 °, 2,3831 °, 124,5089 м ).
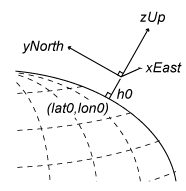
Система «восток-север-вверх» (RUS) использует декартовы координаты (xEast, yNorth, zUp) для представления положения относительно локального начала координат. Локальное начало координат описывается геодезическими координатами (lat0, lon0, h0). Обратите внимание, что начало координат не обязательно лежит на поверхности эллипсоида.
Положительная ось xEast указывает на восток вдоль параллели широты, содержащей лат0.
Положительная ось yNorth указывает на север вдоль меридиана долготы, содержащего lon0.
Положительная ось zUp указывает вверх вдоль эллипсоидной нормали.
Например, Монмартр имеет геодезические координаты (48,8862 °, 2,3343 °, 174,5217 м). Координаты RUS Parc des Buttes-Chaumont относительно Монмартра (3579.4232 м, -688.3514 м, -51.0524 м).
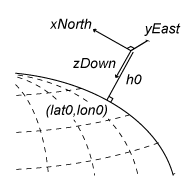
Система «север-восток-вниз» (NED) использует декартовы координаты (xNorth, yEast, zDown) для представления положения относительно локального начала координат. Локальное начало координат описывается геодезическими координатами (lat0, lon0, h0). Обычно локальное начало системы NED находится над поверхностью Земли.
Положительная ось xNorth указывает на север вдоль меридиана долготы, содержащего lon0.
Положительная ось yEast указывает на восток вдоль параллели широты, содержащей лат0.
Положительная ось zDown указывает вниз вдоль эллипсоидной нормали.
Система координат NED обычно используется для задания местоположения относительно движущегося самолета. В этой заявке начало координат и оси системы NED изменяются непрерывно. Следует отметить, что координаты не зафиксированы на раме самолета.
Например, летающий в аэропорт Шарль-де-Голль самолёт имеет геодезические координаты (48,9978 °, 2,7594 °, 699,8683 м). Координаты NED аэропорта по отношению к самолёту - (1645,8313 м, -15677,1868 м, 555,8221 м).
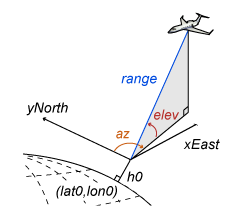
Система AER использует сферические координаты (az, elev, range) для представления положения относительно локального начала координат. Локальное начало координат описывается геодезическими координатами (lat0, lon0, h0). Азимут, отметка и диапазон наклона зависят от локальной декартовой системы, например системы RUS .
az, азимут - угол по часовой стрелке в плоскости xEast-yNorth от положительной оси yNorth до проекции объекта в плоскость.
elev - это угол от плоскости xEast-yNorth до объекта.
диапазон, наклонный диапазон, - евклидово расстояние между объектом и локальным началом координат.
Например, лидарный датчик в аэропорту Шарля де Голля имеет геодезические координаты (48,0124 °, 2,5451 °, 163,4885 м). Координаты АЭР самолёта по отношению к датчику - (95,8314 °, 1,8781 °, 15773.1381 м).
При преобразовании координат между системами RUS, NED и AER с одинаковым началом координат нет необходимости указывать опорный эллипсоид или координаты начала координат.
aer2ned | ecef2enu | enu2aer | geodetic2aer | geodetic2ecef | ned2geodetic
[1] Говэй, К., Б. М. Чех и Т. Х. Ли. Беспилотные винтокрылые системы. Лондон: Springer-Verlag London Limited: 2011.
[2] Ван Сикл, Дж. Основные координаты ГИС. Бока Ратон, Флорида: CRC Press LLC, 2004.
