Обобщенный боковой компенсатор луча
phased.GSCBeamformer Система object™ реализует обобщенный формирователь луча гашения боковых зон (GSC). Формирователь луча GSC разделяет поступающие сигналы на два канала. Один канал проходит через обычный тракт формирователя луча, а второй - в боковой тракт гашения. Алгоритм сначала предварительно направляет матрицу в направлении формирования луча, а затем адаптивно выбирает веса фильтра, чтобы минимизировать мощность на выходе пути гашения боковой зоны. Алгоритм использует наименьшие средние квадраты (LMS) для вычисления адаптивных весов. Конечный сигнал формирования луча представляет собой разность между выходами двух трактов.
Для вычисления сигнала в виде луча:
Создать phased.GSCBeamformer и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
beamformer = phased.GSCBeamformerbeamformer, со значениями свойств по умолчанию.
beamformer = phased.GSCBeamformer(Name,Value)beamformer, с каждым указанным свойством Name, имеющим указанное значение. Можно указать дополнительные аргументы пары имя-значение в любом порядке как (Name1,Value1,...,NameN,ValueN). Заключите каждое имя свойства в отдельные кавычки.
beamformer = phased.GSCBeamformer('SensorArray',phased.ULA('NumElements',20),'SampleRate',300e3) устанавливает массив датчиков в однородный линейный массив (ULA) со значениями свойств ULA по умолчанию, за исключением количества элементов. Формирователь луча имеет частоту дискретизации 300 кГц.Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
Создайте формирователь луча GSC для 11-элементной акустической матрицы в воздухе. На матрицу падают чирпирующий сигнал на 50∘ по азимуту и 0∘ по отметке. Сравните сигнал GSC в виде луча с сигналом Frost в виде луча. Скорость распространения сигнала составляет 340 м/с, а частота дискретизации - 8 кГц.
Создайте микрофон и массив системных объектов. Расстояние между элементами матрицы составляет половину длины волны. Установите частоту сигнала равной половине частоты Найквиста.
c = 340.0; fs = 8.0e3; fc = fs/2; lam = c/fc; transducer = phased.OmnidirectionalMicrophoneElement('FrequencyRange',[20 20000]); array = phased.ULA('Element',transducer,'NumElements',11,'ElementSpacing',lam/2);
Смоделировать сигнал частотной частоты с полосой пропускания 500 Гц.
t = 0:1/fs:.5; signal = chirp(t,0,0.5,500);
Создайте волну происшествия, поступающую в массив. Добавьте гауссовый шум к волне.
collector = phased.WidebandCollector('Sensor',array,'PropagationSpeed',c, ... 'SampleRate',fs,'ModulatedInput',false,'NumSubbands',512); incidentAngle = [-50;0]; signal = collector(signal.',incidentAngle); noise = 0.5*randn(size(signal)); recsignal = signal + noise;
Формирование луча мороза производить под фактическим углом падения.
frostbeamformer = phased.FrostBeamformer('SensorArray',array,'PropagationSpeed', ... c,'SampleRate',fs,'Direction',incidentAngle,'FilterLength',15); yfrost = frostbeamformer(recsignal);
Выполните формирование луча GSC и постройте график выхода формирователя луча по выходу формирователя луча Frost. Также постройте график непереданного сигнала, поступающего в средний элемент матрицы.
gscbeamformer = phased.GSCBeamformer('SensorArray',array, ... 'PropagationSpeed',c,'SampleRate',fs,'Direction',incidentAngle, ... 'FilterLength',15); ygsc = gscbeamformer(recsignal); plot(t*1000,recsignal(:,6),t*1000,yfrost,t,ygsc) xlabel('Time (ms)') ylabel('Amplitude')

Увеличьте изображение небольшой части выходных данных.
idx = 1000:1300; plot(t(idx)*1000,recsignal(idx,6),t(idx)*1000,yfrost(idx),t(idx)*1000,ygsc(idx)) xlabel('Time (ms)') legend('Received signal','Frost beamformed signal','GSC beamformed signal')

Создайте формирователь луча GSC для 11-элементной акустической матрицы в воздухе. На матрицу падают чирпирующий сигнал на 50∘ по азимуту и 0∘ по отметке. Вычисляют сигнал, сформированный лучом, в направлении падающей волны и в другом направлении. Сравните два выхода в виде луча. Скорость распространения сигнала составляет 340 м/с, а частота дискретизации - 8 кГц. Создайте микрофон и массив системных объектов. Расстояние между элементами матрицы составляет половину длины волны. Установите частоту сигнала равной половине частоты Найквиста.
c = 340.0; fs = 8.0e3; fc = fs/2; lam = c/fc; transducer = phased.OmnidirectionalMicrophoneElement('FrequencyRange',[20 20000]); array = phased.ULA('Element',transducer,'NumElements',11,'ElementSpacing',lam/2);
Смоделировать сигнал частотной частоты с полосой пропускания 500 Гц.
t = 0:1/fs:0.5; signal = chirp(t,0,0.5,500);
Создайте падающее волновое поле, попадающее в массив.
collector = phased.WidebandCollector('Sensor',array,'PropagationSpeed',c, ... 'SampleRate',fs,'ModulatedInput',false,'NumSubbands',512); incidentAngle = [-50;0]; signal = collector(signal.',incidentAngle); noise = 0.1*randn(size(signal)); recsignal = signal + noise;
Выполните формирование луча GSC и постройте график выходов формирователя луча. Также постройте график непереданного сигнала, поступающего в средний элемент матрицы.
gscbeamformer = phased.GSCBeamformer('SensorArray',array, ... 'PropagationSpeed',c,'SampleRate',fs,'DirectionSource','Input port', ... 'FilterLength',5); ygsci = gscbeamformer(recsignal,incidentAngle); ygsco = gscbeamformer(recsignal,[20;30]); plot(t*1000,recsignal(:,6),t*1000,ygsci,t*1000,ygsco) xlabel('Time (ms)') ylabel('Amplitude') legend('Received signal at element','GSC beamformed signal (incident direction)', ... 'GSC beamformed signal (other direction)','Location','southeast')

Увеличьте изображение небольшой части выходных данных.
idx = 1000:1300; plot(t(idx)*1000,recsignal(idx,6),t(idx)*1000,ygsci(idx),t(idx)*1000,ygsco(idx)) xlabel('Time (ms)') legend('Received signal at element','GSC beamformed signal (incident direction)', ... 'GSC beamformed signal (other direction)','Location','southeast')

Обобщенный боковой компенсатор (GSC) является эффективной реализацией формирователя луча минимальной дисперсии линейного ограничения (LCMV). Формирование луча LCMV минимизирует выходную мощность матрицы при сохранении мощности в одном или нескольких заданных направлениях. Этот тип формирователя луча называется формирователем луча с ограничениями. Можно вычислить точные веса для ограниченного формирователя луча, но вычисление является дорогостоящим, когда количество элементов велико. Вычисление требует инверсии большой пространственной ковариационной матрицы. Формулировка GSC преобразует задачу LCMV адаптивной оптимизации в задачу адаптивной без ограничений, что упрощает реализацию.
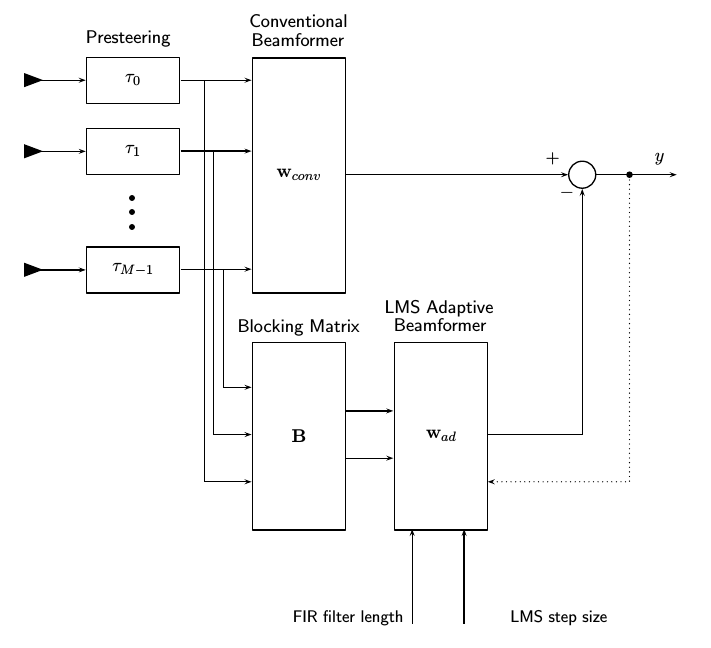
В алгоритме GSC поступающие данные датчика разбиваются на два сигнальных тракта, как показано на блок-схеме. Верхний путь представляет собой обычный формирователь луча. Нижний тракт представляет собой адаптивный неограниченный формирователь луча, целью которого является минимизация выходной мощности GSC. Алгоритм GSC состоит из следующих этапов:
Предварительная обработка данных датчика элемента путем сдвига по времени поступающих сигналов. Предварительная регулировка времени выравнивает все сигналы сенсорных элементов. Временные сдвиги зависят от угла прихода сигнала.
Пропускают предварительно обработанные сигналы через верхний тракт в обычный формирователь луча с фиксированными весами wconv.
Кроме того, предварительно установленные сигналы проходят через нижний тракт в блокирующую матрицу, В. Блокирующая матрица ортогональна сигналу и удаляет сигнал из нижнего тракта.
Фильтрация сигналов нижнего тракта через набор фильтров FIR. Свойство FilterLength задает длину фильтров. Коэффициенты фильтра представляют собой адаптивные веса фильтра, wad.
Вычислите разность между верхним и нижним трактами сигналов. Это различие представляет собой выходной сигнал GSC в виде луча.
Отправьте формируемый лучом выходной сигнал обратно в фильтр. Фильтр адаптирует свои веса с использованием алгоритма наименьшего среднего квадрата (LMS). Фактический размер шага адаптивной LMS равен значению свойства LMSstepSize, деленному на общую мощность сигнала.
Для получения дополнительной информации см. [1].
[1] Гриффитс, Л. Дж. и Чарльз У. Джим. «Альтернативный подход к линейно-ограниченному адаптивному формированию луча». Транзакции IEEE по антеннам и распространению, 30.1 (1982): 27-34.
[2] Деревья фургонов, H. Оптимальная обработка массива. Нью-Йорк: Wiley-Interscience, 2002.
[3] Джонсон, Д. Х., и Дэн Э. Даджеон, Array Signal Processing, Englewood Cliffs: Prentice-Hall, 1993.
phased.FrostBeamformer | phased.MVDRBeamformer | phased.PhaseShiftBeamformer | phased.SubbandPhaseShiftBeamformer | phased.TimeDelayBeamformer | phased.TimeDelayLCMVBeamformer
