Отображение движения РЛС и целей
phased.ScenarioViewer Система object™ создает средство просмотра 3-D для отображения движения радаров и целей, моделируемых при моделировании радара. Можно отобразить текущие положения и скорости, дорожки объекта, аннотации положения и скорости, направления луча радара и другие параметры объекта. Во время моделирования можно изменять такие функции радара, как дальность и ширину луча. Вы можете использовать phased.Platform Системный объект для моделирования движущихся объектов или можно предоставить собственные динамические модели.
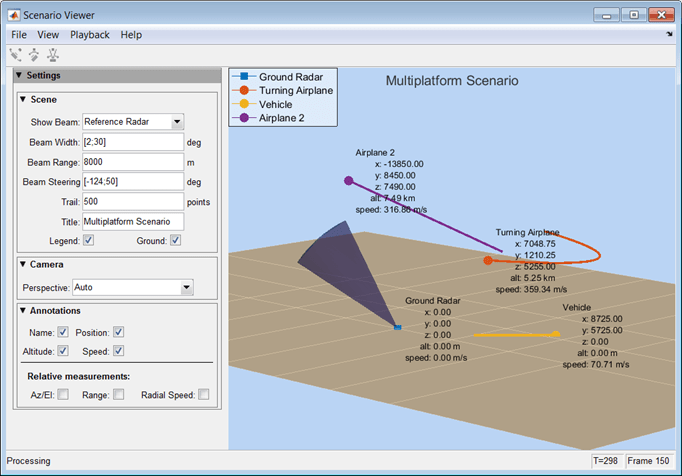
На этом рисунке показан сценарий с четырьмя объектами, состоящий из наземного радара, двух самолетов и наземного транспортного средства. Код, сгенерировавший этот рисунок, можно просмотреть в примере «Визуализация мультиплатформенного сценария».
Чтобы создать средство просмотра сценариев, выполните следующие действия.
Определение и настройка phased.ScenarioViewer Системный объект. См. раздел Строительство. Можно задать свойства объекта System во время конструирования или оставить для них значения по умолчанию. Некоторые свойства, заданные во время конструирования, могут быть изменены позже. Эти свойства можно настроить.
Позвоните в step способ обновления позиций РЛС и цели согласно свойствам phased.ScenarioViewer Системный объект. Настраиваемые свойства можно изменить в любое время.
Примечание
Начиная с R2016b, вместо использования step для выполнения операции, определенной объектом System, можно вызвать объект с аргументами, как если бы это была функция. Например, y = step(obj,x) и y = obj(x) выполнять эквивалентные операции.
sIS = phased.ScenarioViewersIS имеет значения свойств по умолчанию.
sIS = phased.ScenarioViewer(Name,Value)sIS, с любым указанным свойством Name задать для указанного Value. Name должно отображаться внутри отдельных кавычек (''). Можно указать несколько аргументов пары имя-значение в любом порядке как Name1,Value1,...,NameN,ValueN.
| скрыть | Скрыть окно просмотра сценариев |
| сброс | Сброс состояния объекта System |
| показать | Показать окно просмотра сценариев |
| шаг | Обновление просмотра сценариев |
| Общие для всех системных объектов | |
|---|---|
release | Разрешить изменение значения свойства объекта системы |
Визуализация следов радара и одиночной цели самолета. Радар неподвижен, а самолет движется по прямой. Поддерживайте радиолокационный луч, направленный на самолет.
Создайте радар и самолетную платформу System objects™. Установите скорость обновления 0,1 с.
updateRate = 0.1; radarPlatform = phased.Platform(... 'InitialPosition',[0;0;10], ... 'Velocity',[0;0;0]); airplanePlatforms = phased.Platform(... 'InitialPosition',[5000.0;3500.0;6000.0],... 'Velocity',[-300;0;0]);
Создать phased.ScenarioViewer Системный объект. Показать луч радара и аннотировать дорожки с указанием положения, скорости и высоты.
sSV = phased.ScenarioViewer('BeamRange',5000.0,'UpdateRate',updateRate,... 'PlatformNames',{'Ground Radar','Airplane'},'ShowPosition',true,... 'ShowSpeed',true,'ShowAltitude',true,'ShowLegend',true);
Выполните сценарий. На каждом шаге вычислите угол до цели. Используйте этот угол, чтобы направить луч радара к цели.
for i = 1:100 [radar_pos,radar_vel] = step(radarPlatform,updateRate); [tgt_pos,tgt_vel] = step(airplanePlatforms,updateRate); [rng,ang] = rangeangle(tgt_pos,radar_pos); sSV.BeamSteering = ang; step(sSV,radar_pos,radar_vel,tgt_pos,tgt_vel); pause(0.1); end

Визуализация следов бортового радара и цели наземного транспортного средства. Бортовой радар несет беспилотник, летящий на высоте 5 км.
Создание РЛС беспилотного летательного аппарата и наземного летательного аппарата phased.Platform objects™ системы. Установите скорость обновления 0,1 с.
updateRate = 0.1; drone = phased.Platform(... 'InitialPosition',[100;1000;5000], ... 'Velocity',[400;0;0]); vehicle = phased.Platform('MotionModel','Acceleration',... 'InitialPosition',[5000.0;3500.0;0.0],... 'InitialVelocity',[40;5;0],'Acceleration',[0.1;0.1;0]);
Создать phased.ScenarioViewer Системный объект. Показать луч радара и аннотировать дорожки с указанием положения, скорости и высоты.
viewer = phased.ScenarioViewer('BeamRange',8000.0,'BeamWidth',2,'UpdateRate',updateRate,... 'PlatformNames',{'Drone Radar','Vehicle'},'ShowPosition',true,... 'ShowSpeed',true,'ShowAltitude',true,'ShowLegend',true,'Title','Vehicle Tracking Radar');
Выполните сценарий. На каждом шаге вычислите угол до цели. Используйте этот угол, чтобы направить луч радара к цели.
for i = 1:100 [radar_pos,radar_vel] = step(drone,updateRate); [tgt_pos,tgt_vel] = step(vehicle,updateRate); [rng,ang] = rangeangle(tgt_pos,radar_pos); viewer.BeamSteering = ang; viewer(radar_pos,radar_vel,tgt_pos,tgt_vel) pause(.1) end

В этом примере показано, как создать и отобразить мультиплатформенный сценарий, содержащий наземный стационарный радар, поворотный самолет, самолет с постоянной скоростью и движущийся наземный автомобиль. Поворотный самолет следует по параболической траектории полета при снижении со скоростью 20 м/с.
Укажите частоту обновления сценария на частоте 0,5 Гц. Для 150 шагов продолжительность сценария составляет 300 с.
updateRate = 0.5; N = 150;
Настройка поворотного самолета с помощью Acceleration модель phased.Platform object™ системы. Указать исходное положение самолета по дальности и азимуту от БРЛС и его отметке. Самолёт находится в 10 км от РЛС на азимуте 60 ° и имеет высоту 6 км. Самолёт разгоняется на 10 м/с ² в отрицательном x-направлении.
airplane1range = 10.0e3; airplane1Azimuth = 60.0; airplane1alt = 6.0e3; airplane1Pos0 = [cosd(airplane1Azimuth)*airplane1range;... sind(airplane1Azimuth)*airplane1range;airplane1alt]; airplane1Vel0 = [400.0;-100.0;-20]; airplane1Accel = [-10.0;0.0;0.0]; airplane1platform = phased.Platform('MotionModel','Acceleration',... 'AccelerationSource','Input port','InitialPosition',airplane1Pos0,... 'InitialVelocity',airplane1Vel0,'OrientationAxesOutputPort',true,... 'InitialOrientationAxes',eye(3));
Установите стационарный наземный радар в начало глобальной системы координат. Для моделирования вращающейся РЛС измените угол поворота луча наземного РЛС в контуре обработки.
groundRadarPos = [0,0,0]'; groundRadarVel = [0,0,0]'; groundradarplatform = phased.Platform('MotionModel','Velocity',... 'InitialPosition',groundRadarPos,'Velocity',groundRadarVel,... 'InitialOrientationAxes',eye(3));
Настройка наземного транспортного средства для движения с постоянной скоростью.
groundVehiclePos = [5e3,2e3,0]'; groundVehicleVel = [50,50,0]'; groundvehicleplatform = phased.Platform('MotionModel','Velocity',... 'InitialPosition',groundVehiclePos,'Velocity',groundVehicleVel,... 'InitialOrientationAxes',eye(3));
Настройте второй самолет так, чтобы он также двигался с постоянной скоростью.
airplane2Pos = [8.5e3,1e3,6000]'; airplane2Vel = [-300,100,20]'; airplane2platform = phased.Platform('MotionModel','Velocity',... 'InitialPosition',airplane2Pos,'Velocity',airplane2Vel,... 'InitialOrientationAxes',eye(3));
Настройте средство просмотра сценариев. Указать радиолокатор, имеющий дальность луча 8 км, вертикальную ширину луча 30 ° и горизонтальную ширину луча 2 °. Аннотировать трассы с указанием положения, скорости, высоты и дальности.
BeamSteering = [0;50]; viewer = phased.ScenarioViewer('BeamRange',8.0e3,'BeamWidth',[2;30],'UpdateRate',updateRate,... 'PlatformNames',{'Ground Radar','Turning Airplane','Vehicle','Airplane 2'},'ShowPosition',true,... 'ShowSpeed',true,'ShowAltitude',true,'ShowLegend',true,'ShowRange',true,... 'Title','Multiplatform Scenario','BeamSteering',BeamSteering);
Пройдите по контуру обработки дисплея, обновив позиции РЛС и цели. Поверните угол поворота РЛС на четыре градуса на каждом шаге.
for n = 1:N [groundRadarPos,groundRadarVel] = groundradarplatform(updateRate); [airplane1Pos,airplane1Vel,airplane1Axes] = airplane1platform(updateRate,airplane1Accel); [vehiclePos,vehicleVel] = groundvehicleplatform(updateRate); [airplane2Pos,airplane2Vel] = airplane2platform(updateRate); viewer(groundRadarPos,groundRadarVel,[airplane1Pos,vehiclePos,airplane2Pos],... [airplane1Vel,vehicleVel,airplane2Vel]); BeamSteering = viewer.BeamSteering(1); BeamSteering = mod(BeamSteering + 4,360.0); if BeamSteering > 180.0 BeamSteering = BeamSteering - 360.0; end viewer.BeamSteering(1) = BeamSteering; pause(0.2); end

